Разрывные отображения
В большинстве вибрационных машин и устройств, применяемых на практике (добыча и переработка полезных ископаемых, химическая промышленность, металлургия, строительство, приборостроение и т.д.), колебания возбуждаются механическими дебалансными вибровозбудителями. Такие вибровозбудители представляют собой неуравновешенные роторы, приводимые во вращение электродвигателями постоянного или переменного тока.
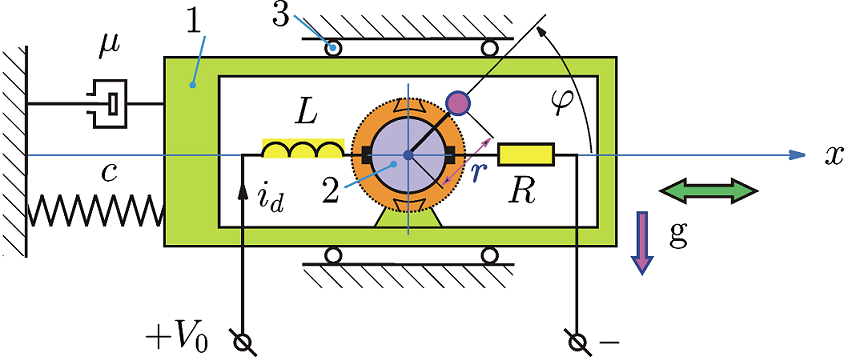
Вибрационная машина с дебалансными вибровозбудителем
На платформе 1 массой
Управление колебаниями вибрационной машины
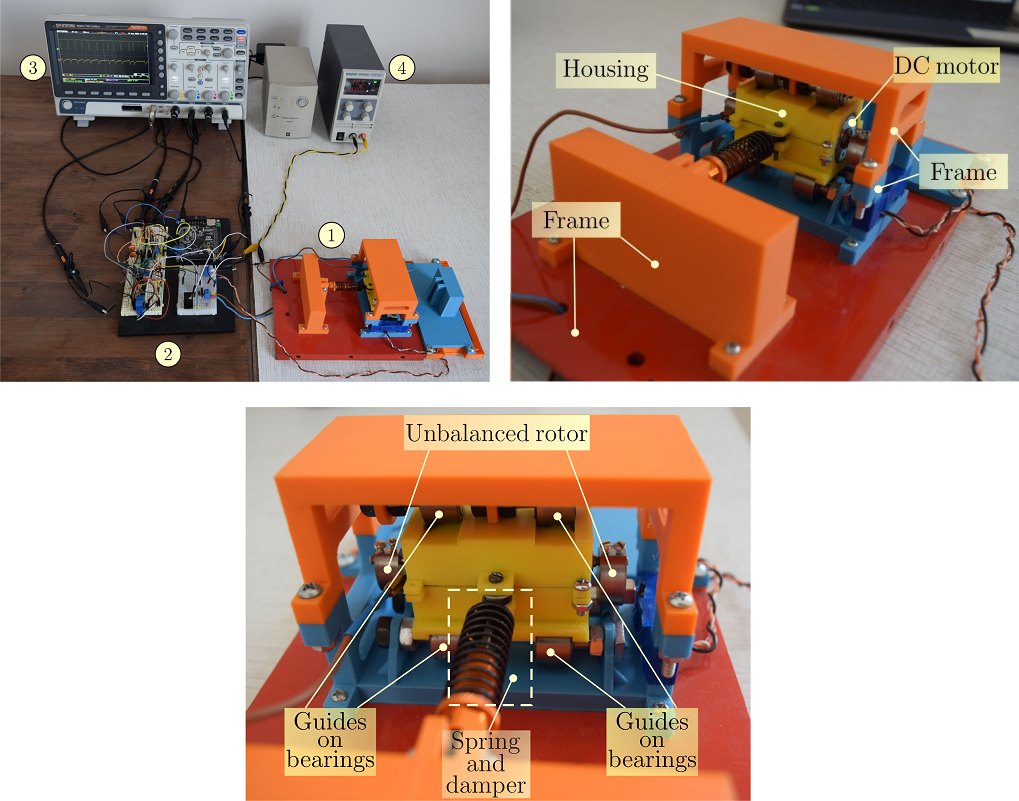
Экспериментальная установка вибрационной машины с релейным управлением. Здесь 1,2 - вибрационная машина и система управления; 3, 4 - осциллограф и источник питания
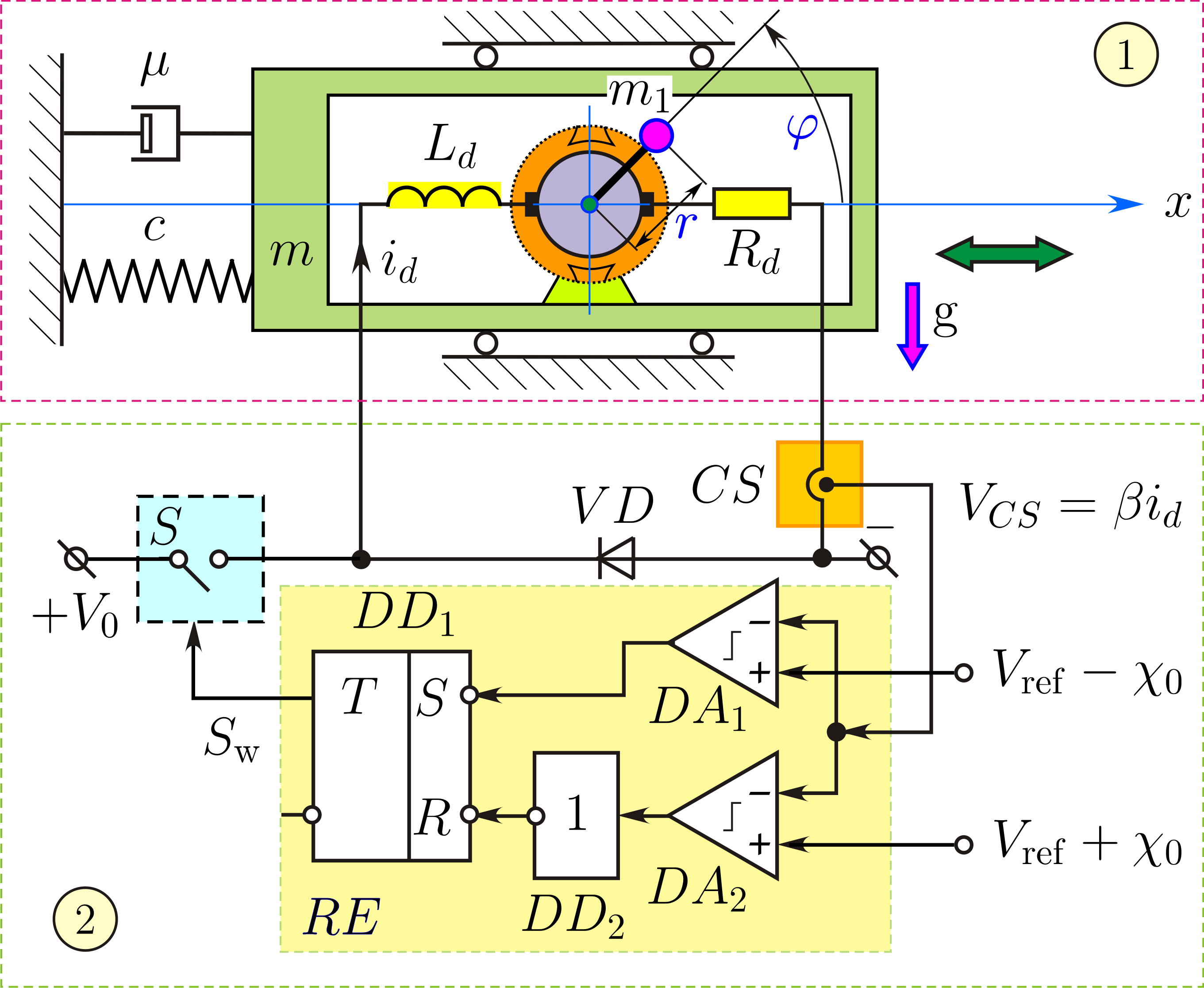
Функциональная схема системы
Математическая модель вибрационной машины с релейным автоматическим управлением
Здесь
Если
Параметры двигателя MAXON RE 25:
Параметры системы управления и механической части:
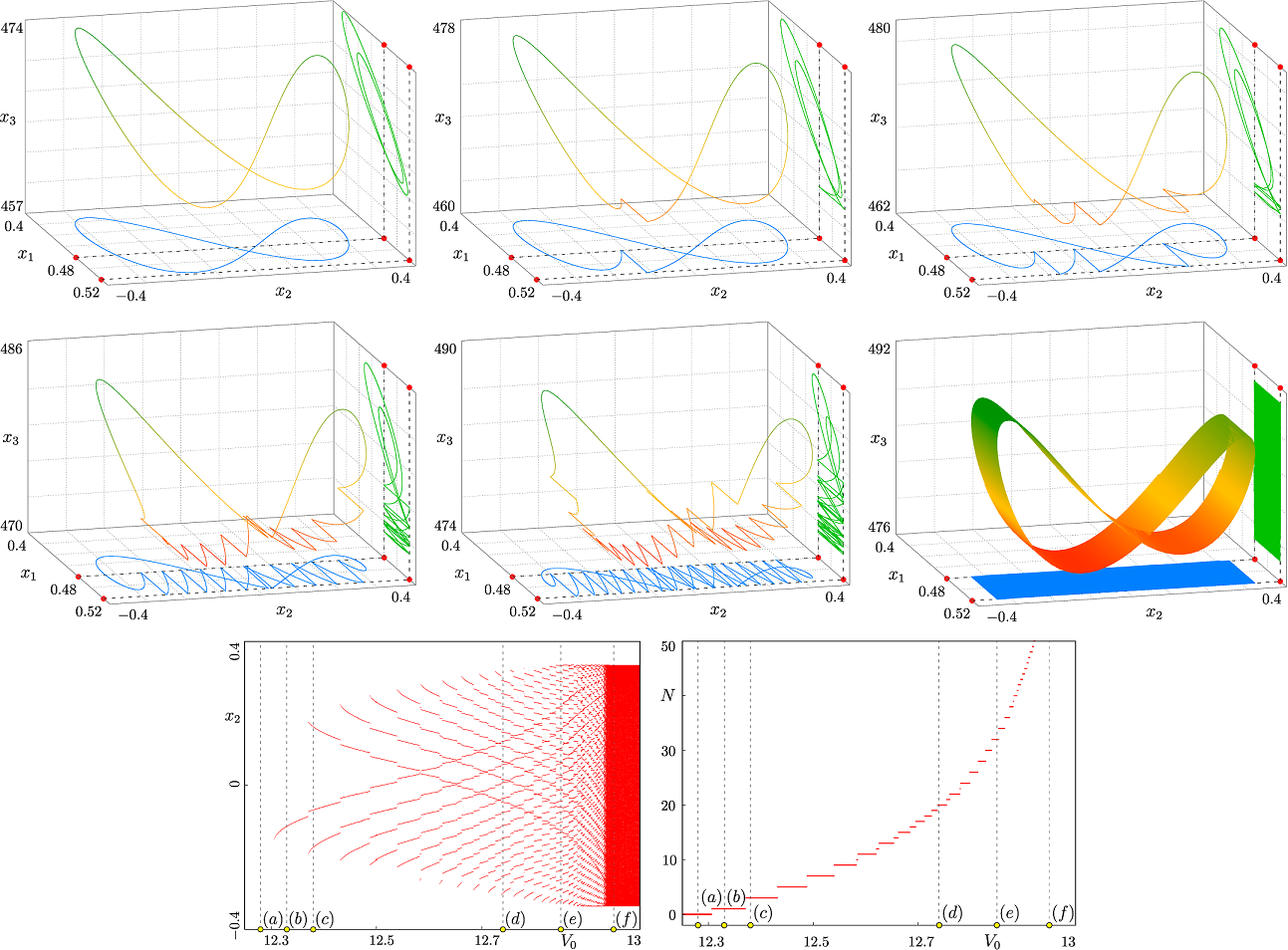
Результаты численных экспериментов. Явление синхронизации
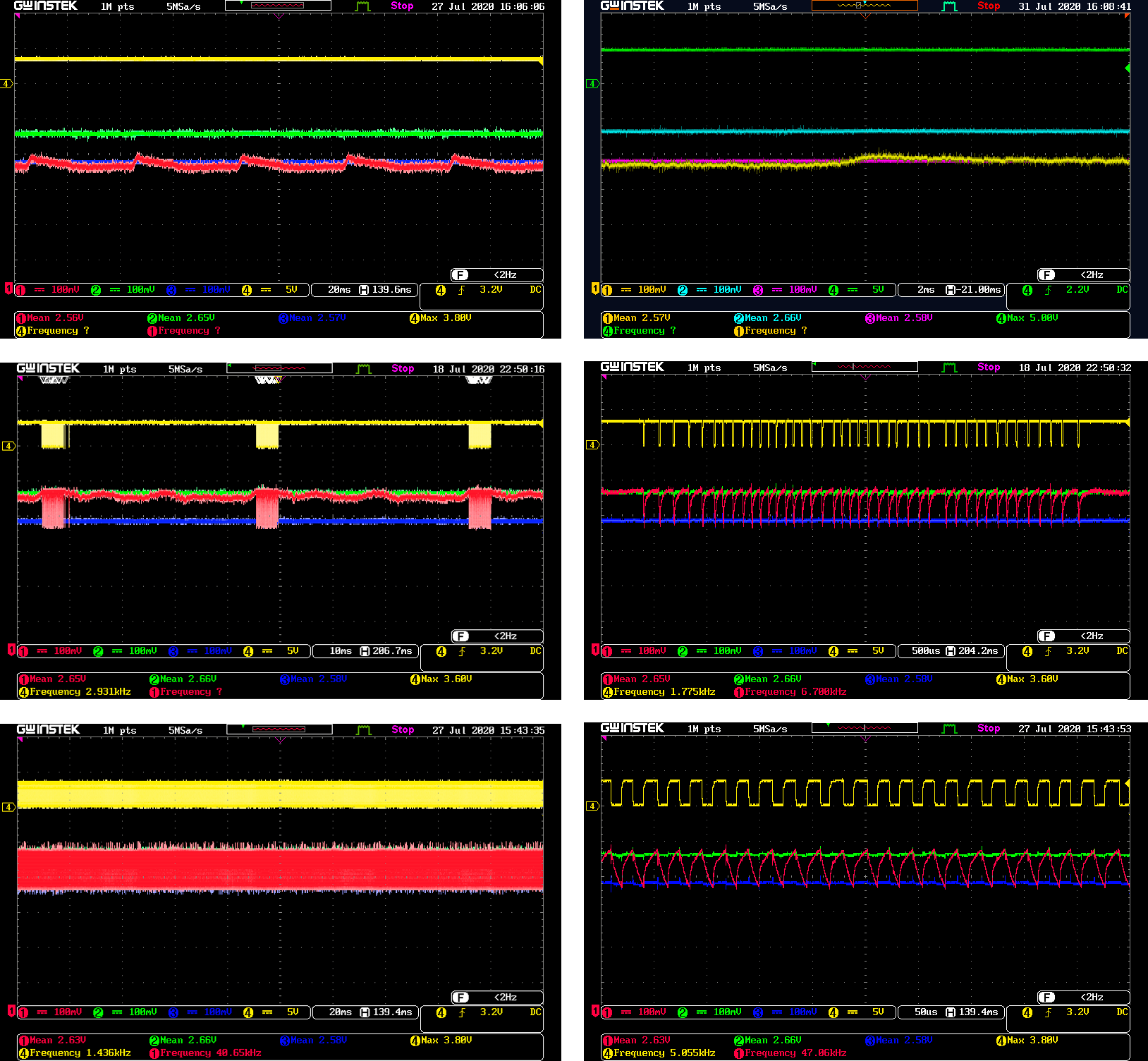
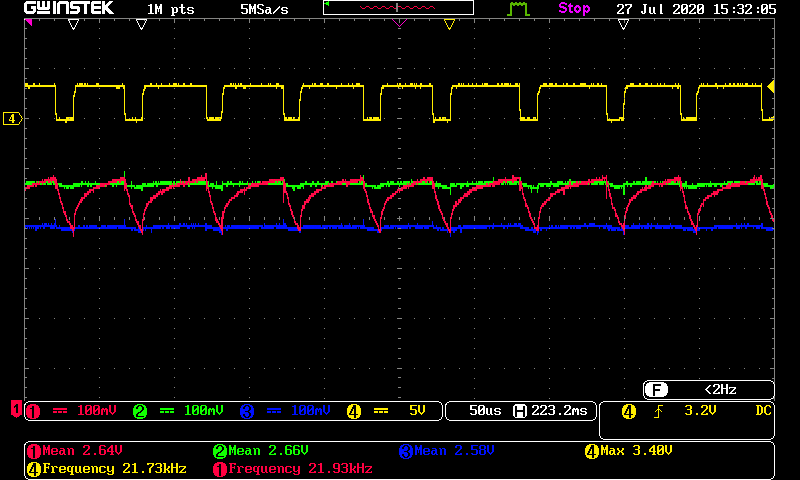
Результаты экспериментальных исследований динамических режимов на установке
Сведение многомерной динамической системы к маломерной с двумя масштабами времени
Уравнение движения:
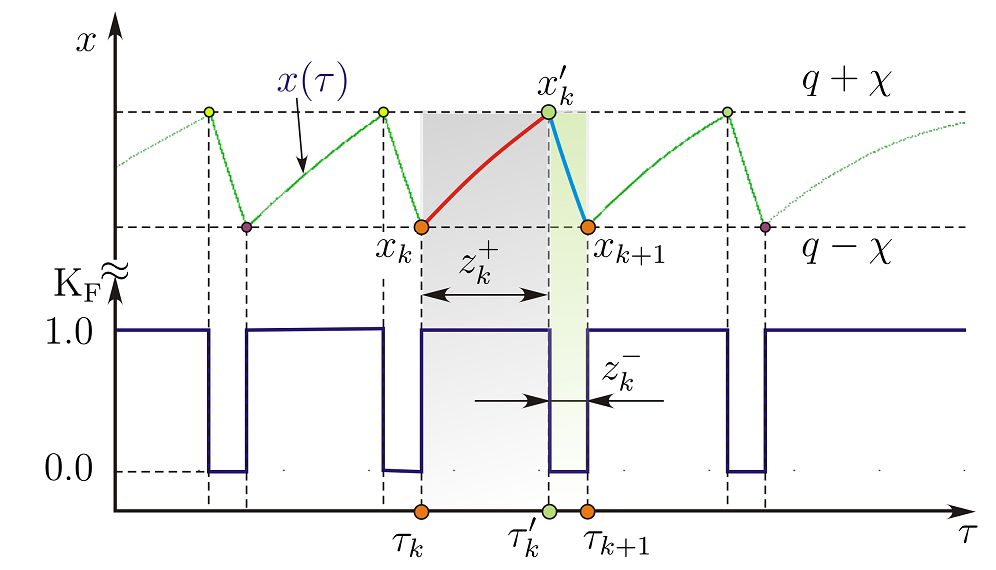
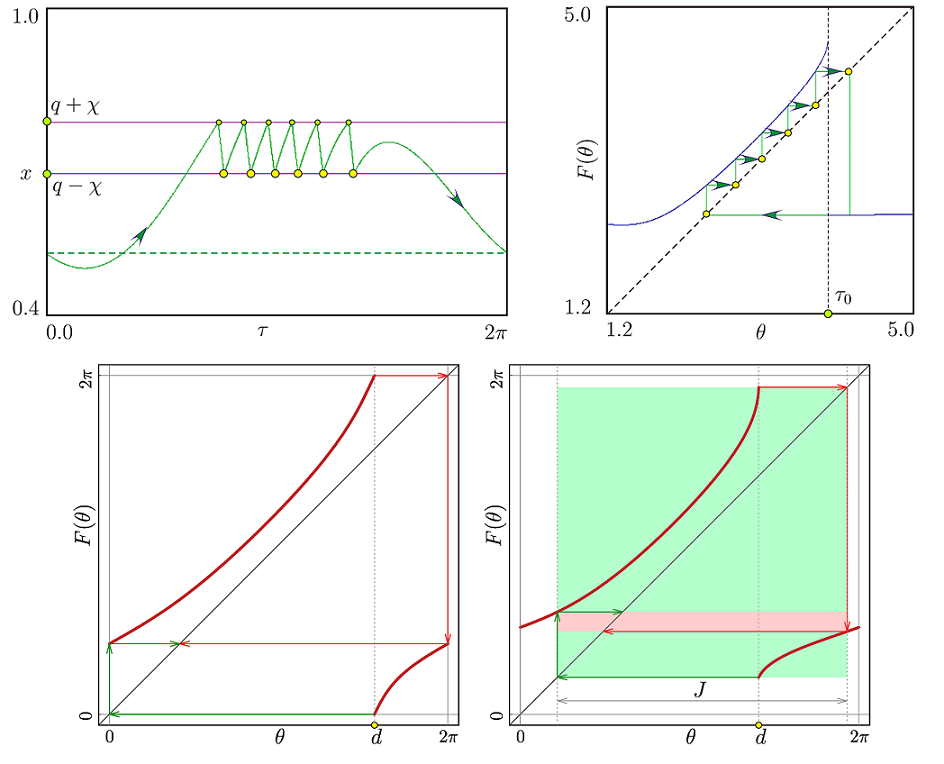
Построение разрывного отображения окружности
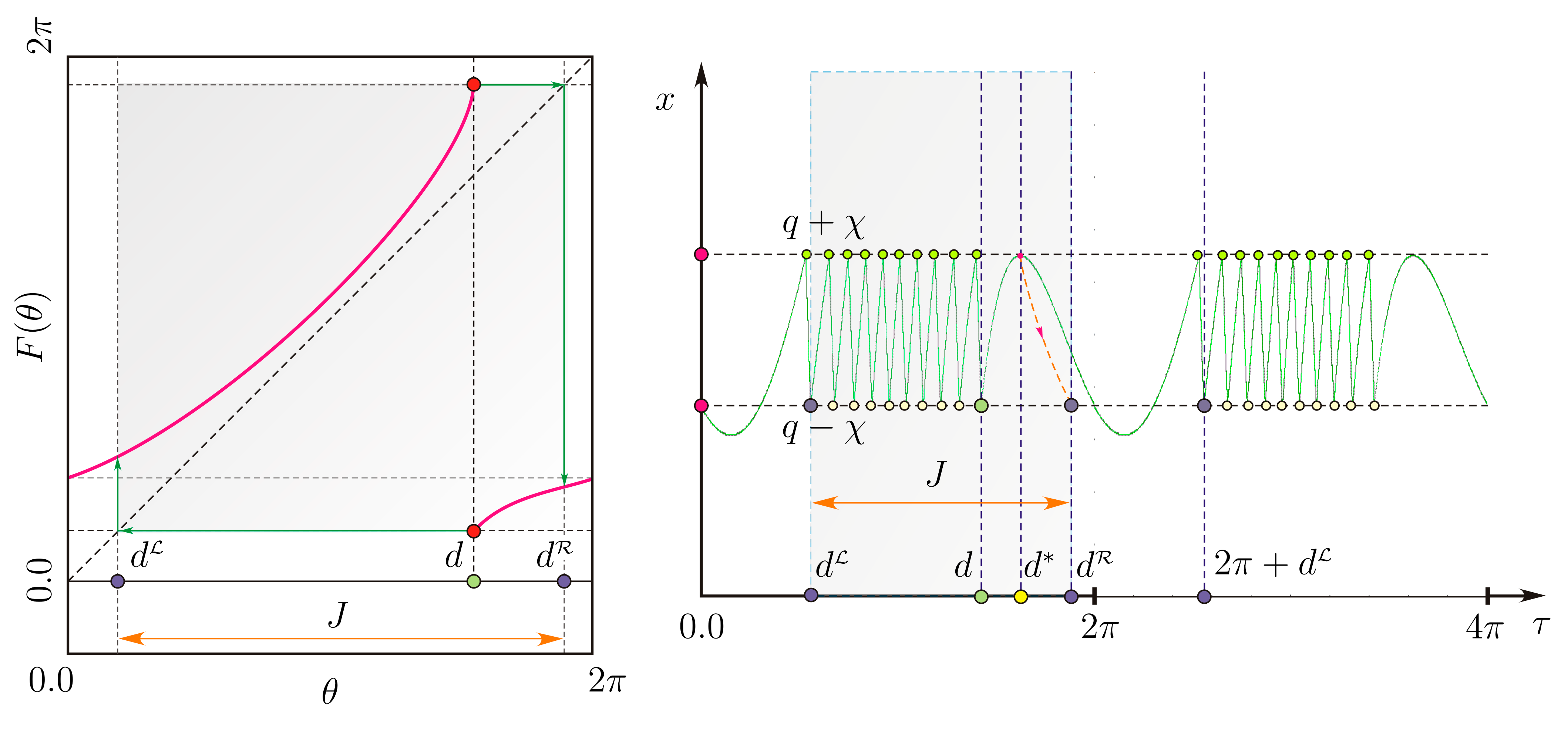
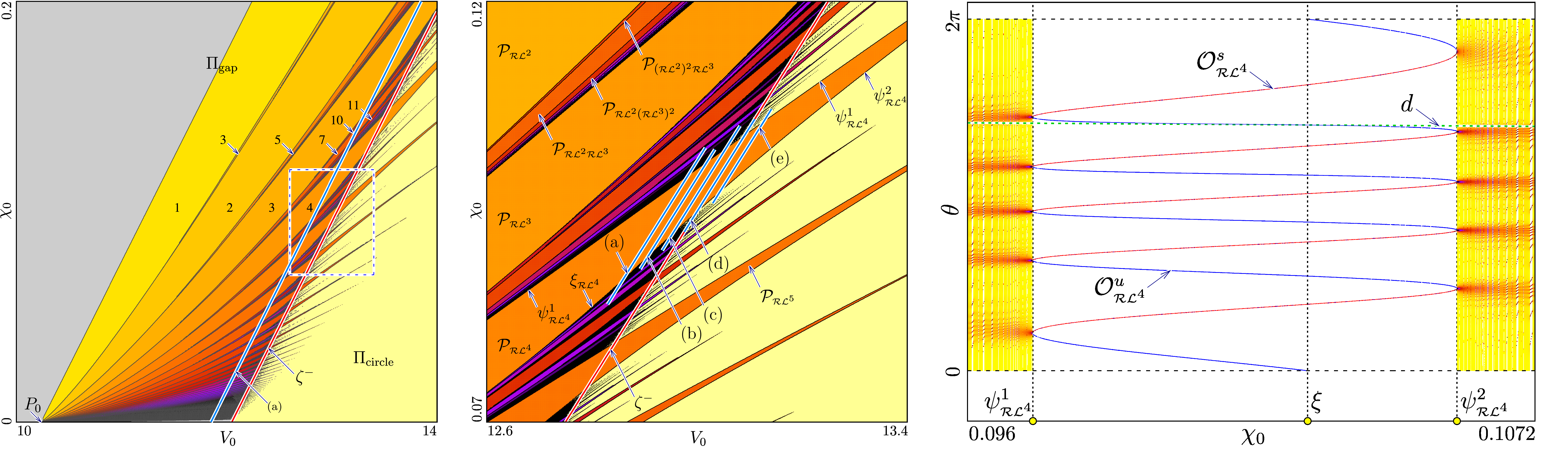
Бифуркационная структура
Основные публикации по результатам исследований
- Zh. T. Zhusubaliyev, V. Avrutin½ V. G. Rubanov, D. A. Bushuev, D. V. Titov, and O. O. Yanochkina, Persistence Border Collisions in a Vibrating System Excited by an Unbalanced Motor With a Relay Control. 8th Polyakhov's Reading: Proceedings of the International Scientific Conference on Mechanics// American Institute of Physics (AIP) Conference Proceedings,1959, 2018, (080022-1 - 080022-8).
- Zh. T. Zhusubaliyev, V. Avrutin, V. G. Rubanov c, D. A. Bushuev, Complex dynamics of a vibration machine caused by a relay feedback control// Physica D: Nonlinear Phenomena, 420, 132870 (15 pages),2021 (impact factor 2.3, квартиль Q1).
- Zh. T. Zhusubaliyev, V. Avrutin, V. G. Rubanov, D. A. Bushuev, D. V. Titov, and O. O. Yanochkina, Persistence border collisions in a vibration system with a relay control// 2018 International Symposium on Nonlinear Theory and Its Applications, NOLTA2018, Tarragona, Spain, September 2-6, 2018, 332 - 334.
- Zh. T. Zhusubaliyev, V. Avrutin, Border-collisions in a periodically forced self-oscillatory piecewise smooth system with a high number of switching manifolds//15th International Conference Dynamical Systems - Theory and Applications, DSTA, December 2-5, 2019. Lodz, Poland.