ПРИМЕНЕНИЕ МЕХАТРОННЫХ СИСТЕМ В МЕДИЦИНСКОЙ ТЕХНИКЕ
ПРИМЕНЕНИЕ МЕХАТРОННЫХ СИСТЕМ
В МЕДИЦИНСКОЙ ТЕХНИКЕ
1. НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯ МЕДИЦИНСКИХ МЕХАТРОННЫХ СИСТЕМ
2.1. Назначение и классификация медицинских роботов
2.2. Роботы для реабилитации инвалидов
3. МЕХАТРОННЫЕ СИСТЕМЫ РЕАБИЛИТАЦИИ
3.1. История аппаратной физиотерапии
3.2. Назначение и классификация мехатронных систем реабилитации
3.3. Современные устройства механотерапии
4. МЕХАТРОННЫЕ СИСТЕМЫ ДЛЯ МАНУАЛЬНОЙ ТЕРАПИИ И МАССАЖА
4.1. Особенности проектирования устройств для массажа
4.2 Классификация устройств для автоматизированного массажа
4.3. Существующие конструкции устройств для автоматизированного массажа
5.1. Назначение и классификация экзоскелетов
5.2. Существующие конструкции экзоскелетов
6. МЕХАТРОННЫЕ МЕДИЦИНСКИЕ СИСТЕМЫ, РАЗРАБОТАННЫЕ В ЮЗГУ
6.1. Мехатронные реабилитационные системы
6.2. Мехатронные устройства для автоматизированного массажа
Медицинская техника — совокупность технических средств, используемых в медицине в целях профилактики, диагностики, лечении заболеваний, реабилитации, проведении санитарно-гигиенических и противоэпидемических мероприятий, а также работ по приготовлению лекарств в аптеках.
В последние годы всё более широкое распространение в технике, в том числе медицинской, получают мехатронные системы.
Мехатроника – область науки и техники, основанная на системном объединении узлов точной механики, датчиков состояния внешней среды и самого объекта, источников энергии, исполнительных механизмов, усилителей, вычислительных устройств (микропроцессоры и ЭВМ). Мехатронная система – единый комплекс электромеханических, электрогидравлических, электронных элементов и средств вычислительной техники, между которыми осуществляется постоянный обмен энергией и информацией, объединённый общей системой автоматического управления, обладающей элементами искусственного интеллекта.
Основные направления развития медицинской мехатроники – разработка систем для реабилитации инвалидов, выполнения сервисных операций, а также для клинического применения.
Следует отметить, что медицинские мехатронные системы являются медицинскими по своей сути, объединяя в единое целое механические и электронные компоненты, функционирующие в составе интеллектуальной мехатронной системы.
В данном учебном курсе рассмотрены основные достижения в области медицинской мехатроники и намечены перспективы ее дальнейшего развития.
1. НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯ МЕДИЦИНСКИХ МЕХАТРОННЫХ СИСТЕМ
Медицинская техника — совокупность технических средств, используемых в медицине в целях профилактики, диагностики, лечении заболеваний, реабилитации, проведении санитарно-гигиенических и противоэпидемических мероприятий, а также работ по приготовлению лекарств в аптеках.
Развитие медицинской техники неразрывно связано с научно-техническим прогрессом, появлением новых представлений в медицине и здравоохранении, что в свою очередь способствует появлению новых образцов, способствует развитию прогрессивных форм профилактики, диагностики и лечения заболеваний, новых методов и приёмов оказания медицинской помощи.
Развитие направлений, позволяющих получить объективные данные для диагностики, связаны с использованием и улучшением существующих образцов приборов и аппаратов для интроскопии (рентгенография, эндоскопия, ультразвуковые диагностические приборы), приборов для лабораторной диагностики (автоанализаторы, микроскопы), терапевтических аппаратов-электростимуляторов, ультразвуковой и механотерапевтической техники, техники гемосорбции и гемоперфузии (искусственная почка), средств механизации и автоматизации трудоёмких процессов в медицине (медицинское оборудование).
К основным преимуществам мехатронных устройств по сравнению традиционными средствами автоматизации медицинских операций следует отнести:
- относительно низкую стоимость благодаря высокой степени интеграции, унификации и стандартизации всех элементов и интерфейсов;
- высокое качество реализации сложных и точных движений вследствие применения методов интеллектуального управления;
- высокую надежность, долговечность и помехозащищенность;
- конструктивную компактность модулей (вплоть до миниатюризации и микромашинах),
- улучшенные массогабаритные и динамические характеристики машин вследствие упрощения кинематических цепей;
- возможность комплексирования функциональных модулей в сложные мехатронные системы и комплексы под конкретные задачи заказчика.
К медицинской технике относятся:
· Медицинские роботы
· Системы реабилитации пациентов
· Системы для мануальной терапии и массажа
· Наркозно-дыхательная аппаратура
· Реанимационное и анестезиологическое оборудование
· Диагностическое оборудование
· Хирургическое оборудование
Основу медицинских средств составляют:
· инструменты общехирургического и специального назначения:
· акушерско-гинекологический инструментарий,
· радиологический инструментарий,
· стоматологический инструментарий,
· хирургический инструментарий;
· приборы и аппараты:
· сшивающие аппараты,
· рентгеновские и радиологические аппараты применяемые в лучевой терапии (рентгенофлуоресцентный анализ),
· эндоскопы и эндоскопическая ретроградная панкреатохолангиография,
· ультразвуковая техника для визуализации внутренних структур организма,
· тепловизионная аппаратура,
· средства функциональной диагностики,
· приборы для снятия электрических сигналов сердца (электрокардиография), мозга (электроэнцефалография), скелетных мышц (электромиография), гладких мышц желудка и кишечника (электрогастроэнтерография),
· исследования артериального и венозного давления (кровяное давление, сфигмоманометрия), кровенаполнения, дыхания (спирометрия),
· средства для лабораторного исследования крови и других биологических жидкостей,
· УВЧ-аппараты,
· аппаратура для светолечения, водолечения (ванны)
· аппаратура для электроакупунктуры (рефлексотерапия),
· техника для механотерапии, баротерапии, оксигенобаротерапии и др.
Сегодня ведутся разработки передвижных комплексов медицинской техники для врачей разных специальностей (офтальмолога, терапевта, стоматолога, флюорографического кабинета в кузове) и т. д.
Разрабатываются и внедряются так называемые «электронные советники врача»; благодаря развитию вычислительной техники появились различные системы поддержания жизни при временной утрате организмом отдельных функций (искусственное лёгкое, искусственное сердце, искусственная почка).
Оборудование поддержания жизни предназначено для поддержания работы тела пациента. Оно включает в себя медицинские вентиляторы (аппарат ИВЛ), сердечно-легочные аппараты и аппараты для диализа.
Терапевтическое оборудование включает в себя инфузионные насосы (самые известные), аппараты ультразвуковой терапии.
Медицинские мониторы позволяют медицинскому персоналу отслеживать состояние пациента, включая ЭКГ, ЭЭГ, давление крови и растворение газов в крови.
Диагностическое оборудование, включая медицинские оборудование для получения изображений. Например, аппараты для УЗИ, ядерного магнитного резонанса, компьютерные томографы, эмиссионные томографы и рентгеновские аппараты.
Хирургическое оборудование включает в себя: операционный стол, операционный светильник, подвесные потолочные консоли, медицинский аспиратор. Эндохирургические лапароскопические видеокомплексы и оборудование, предназначенное для диагностики, лечения внутриполостных, внутриартериальных и др. областей организма.
Медицинское лабораторное оборудование автоматизирует анализы крови, мочи, кала и генов.
Оборудование для транспортировки пациента включается в себя: медицинскую каталку, перекладчики пациентов, транспортные инкубаторы для новорожденных
Оборудование для вызова медицинского персонала (палатная сигнализация/система вызова персонала) осуществляет передачу вызовов из больничных палат на дежурные посты медицинского персонала с текстовой, оптической и акустической идентификацией точек вызова и типов вызывных сигналов.
Для функциональной диагностики используют оборудование, работа которого основана на принципах доплерографии, рентгенографии, кардиографии, электрофизиологических методах (ЭЭГ, ЭКГ, электрогастрография, ацидогастрометрия и т. д.) и др.
Большое количество медоборудования производится зарубежными компаниями, как, например: Dräger Medical, Schiller AG, Acutronic Medical Systems AG, General Electric, Philips, Siemens AG, MAQUET, Trumph, Shmitz, Lismore Instruments Ltd., Atom Medical Corporation, Medtronic и др.
Сегодня производители из РФ также предлагают широкий спектр продукции. Примеры отечественных производителей: «Альтоника», «Биосс», «Исток-Система», «Медиком», «Мера-ТСП», «Нейрософт», ОКБ "Ритм" и другие.
Далее будут более подробно рассмотрены некоторые виды медицинских мехатронных систем.
2.1. Назначение и классификация медицинских роботов
Последнее десятилетие отмечено бурным развитием высоких медицинских технологий, формирующих облик медицины 21 века. Во многих развитых странах активно ведутся разработки различных мехатронных устройств медицинского назначения. Основные направления развития медицинской мехатроники – разработка систем для реабилитации инвалидов, выполнения сервисных операций, а также для клинического применения. Основные направления развития медицинской мехатроники представлены на рис. 2.1.
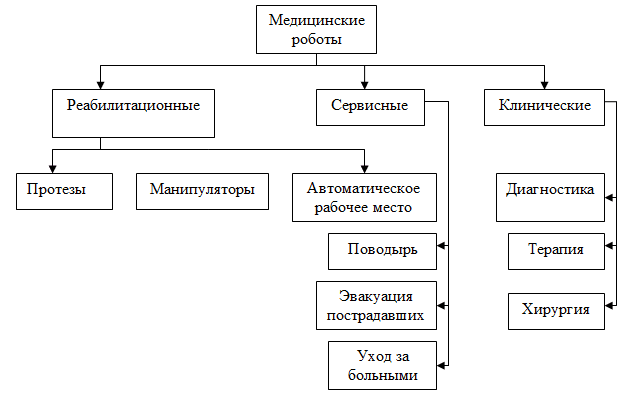
Рисунок 2.1. Основные направления развития медицинской мехатроники.
Робототехника - область науки и техники, ориентированная на создание роботов и робототехнических систем, предназначенных для автоматизации сложных технологических процессов и операций, в том числе, выполняемых в недетерминированных условиях, для замены человека при выполнении тяжелых, утомительных и опасных работ.
Вся совокупность медицинских робототехнических систем (РТС) делится на три укрупненные категории:
· реабилитационные РТС (как правило, мобильные роботы), это различного рода протезы и манипуляторы;
· сервисные РТС (тоже, как правило мобильные роботы) – роботы-поводыри для слепых и слабовидящих людей, роботы-сиделки и т.п.;
· клинические РТС; к этой категории относятся диагностические мехатронные системы, хирургические и терапевтические роботы, как правило это роботы-манипуляторы.
Все большую роль играют микророботы, способные самостоятельно функционировать внутри человеческого организма. Отметим, что медицинские робототехнические системы являются медицинскими по своей сути, объединяя в единое целое механические и электронные компоненты, функционирующие в составе интеллектуальной робототехнической системы. ниже рассмотрены основные достижения в области медицинской мехатроники и намечены перспективы ее дальнейшего развития.
2.2. Роботы для реабилитации инвалидов
Медицинские роботы реабилитации предназначены главным образом для решения двух задач: восстановления функций утраченных конечностей и жизнеобеспечения инвалидов, прикованных к постели (с нарушениями зрения, опорно-двигательного аппарата и другими тяжкими заболеваниями).
История протезирования насчитывает не одно столетие, но к мехатронике непосредственное отношение имеют лишь так называемые протезы с усилением. Современные автоматизированные протезы не нашли широкого применения из-за конструктивных и эксплуатационных несовершенств и малой надежности в работе. Но уже сейчас делается многое, чтобы улучшить их характеристики за счет внедрения в их конструкцию новых материалов и элементов, таких, как пленочные тензодатчики для управления силой сжатия пальцев руки-протеза, электронно-оптические датчики, монтируемые в оправе очков для управления протезом руки с помощью глаз пациента и т.п.
В Японии разработана механическая рука, исполнительный орган которой имеет шесть степеней свободы и систему управления протезом (рис. 2.2.)

Рисунок 2.2. Пример роботизированной «руки»
В Оксфорде (Великобритания) создана система управления для манипуляторов, предназначенных для протезирования, особенностью которых является способность выполнения заданий заранее не запрограммированных. Они обеспечивают обработку сенсорной информации, включая систему распознавания речи. Одной из проблем является формирование управляющих сигналов пациентом без помощи конечностей. Известны устройства для помощи пациентам с двумя или четырьмя ампутированными или парализованными конечностями, приводимые в движение с помощью электрического сигнала, возникающими в результате сокращения мышц головы или туловища. Разработана конструкция механической руки с телесистемой, управление которой осуществляется датчиками на голове больного, реагирующими на движение головы или бровей и подающими сигналы микропроцессору, управляющему исполнительным органом манипулятора.
Для решения задач жизнеобеспечения неподвижных больных созданы различные варианты роботизированных систем. Качественно новым конструктивным решением является антропоморфная рука – манипулятор, смонтированная на инвалидной коляске и управляемая ЭВМ. Данная система позволяет больному с минимальным уровнем подготовки управлять рукой - манипулятором для удовлетворения физиологических потребностей, пользования телефоном и т.д.
Известны медицинские роботизированные комплексы, функционирование которых осуществляется через центральный контрольный пост или с помощью различных командных устройств, задание для которых пациент формирует с помощью речевых команд. Система включает в себя антропоморфную руку - манипулятор, управляющую аппаратуру, командное устройство, телевизионный монитор, а также автоматизированную транспортную тележку. По желанию больного включаются телевизор, радио, осветительные приборы, изменяется положение больного на кровати, приводится в действие манипулятор.
Важной проблемой, связанной с реабилитацией инвалидов, является создание для них рабочих мест. В Великобритании разработано автоматизированное рабочее место для инвалидов с нарушениями опорно-двигательной системы. Робот представляет собой манипуляционную систему, которая управляет речевыми командами оператора; он способен по желанию пациента выбирать музыкальные диски, книги, переворачивать листы читаемой книги, переключать периферийные устройства компьютера, набирать номера телефонов.
В США было разработано автоматизированное рабочее место с антропоморфной рукой – манипулятором для инвалидов, страдающих тяжелой формой нарушения опорно–двигательной системы. Пациент с минимальным уровнем подготовки может управлять роботом, предназначенным для приема пищи, питья, ухода за волосами, чистки зубов, чтения, пользования телефоном, а также для работы на персональном компьютере. Контроллер, размещенный под подбородком пациента, для управления автоматизированным рабочим местом может монтироваться на инвалидной коляске или на столе рабочего места. Это делает, в частности, возможным использование большого числа автоматизированных рабочих мест для одновременного кормления группы пациентов. Такие мероприятия обеспечивают пациентам возможность общения друг с другом и способствуют их осознанию себя как полноправного члена общества.
Медицинские роботы сервисного назначения призваны решать транспортные задачи по перемещению пациентов, различных предметов, связанных с их обслуживанием и лечением, а также выполнять необходимые действия по уходу за больными, прикованными к постели.
Внедрение в систему здравоохранения роботов этой группы позволит освободить медперсонал от рутинной вспомогательной работы, предоставив ему возможность заниматься своими профессиональными делами.
Разработан робот, выполняющий функции, связанные с приложением больших усилий – транспортировка, укладывание больных и т.п. Робот представляет собой электрогидравлическую систему с автономным источником питания. Возможность управлять роботом предоставляется как пациенту, так и медперсоналу. Он оснащен сенсорной системой. Робот способен обслуживать больного, масса которого не превышает 80 кг.
В Великобритании разрабатывается роботизированное устройство, способное выполнять операции по переворачиванию лежачих тяжелобольных с целью устранения у них пролежней. В результате появляется возможность устранить вынужденные потери и освободить медсестер от выполнения этой изнурительной работы. Такие устройства позволяют, в частности, одному медработнику мыть в ванне тяжелобольных, не прибегая к помощи других сотрудников.
В Японии разработан образец мобильного робота – поводыря Meldog для слепых, представляющий собой небольшую траспортную четырехколесную полноприводную тележку, система управления которой оснащена системой технического зрения и ЭВМ (рис. 2.3.). В память ЭВМ записан маршрут движения в пределах данного населенного пункта. Одни датчики робота по месторасположению стен домов и выбранных опорных точек идентифицируют уличные перекрестки, другие обнаруживают дорожные препятствия. По сигналам с датчиков бортовая ЭВМ робота вырабатывает стратегию преодоления препятствий.

Робот – поводырь управляет движением слепого пациента с помощью элементов связи, которые расположены на мягком прилегающем к телу инвалида поясе. Электрические импульсы, генерируемые этим поясом, являются командами для пациента при остановке робота или его повороте налево или направо. Робот контролирует скорость своего передвижения и останавливается в 1..2 м впереди ведомого слепого пациента. В перспективе появление подобных мобильных роботов с улучшенной системой управления, основанной на принципах вероятностной логики.
Внедрение транспортных мобильных роботов в инфраструктуру медицинских учреждений России значительно облегчит решение вопроса о нехватке младшего медицинского персонала.
Основными видами транспортировочных работ, которые предполагается поручать медицинским мобильным роботам, является: централизованная доставка медицинских материалов и оборудования, лотков и поддонов с пищей для пациентов, лабораторных анализов, готовых медикаментов, почты для больных, а также утилизация и транспортировка материалов и отходов из служебных помещений.
В США разработан транспортный мобильный робот для госпиталей. В госпитале г. Данбэри этот робот в автономном режиме управления развозит лотки с пищей. Госпиталь насчитывает 450 коек для больных. Ежедневно робот развозит около 90 поддонов или лотков с пищей для вновь прибывших пациентов.
Медицинский робот Helpmate оснащен системой технического зрения, состоящей из нескольких цветных ТВ – камер, акустических локаторов и неконтактных НК – датчиков для обнаружения дорожных препятствий, измерения расстояния до них и составления маршрута безопасного движения (рис. 2.4.). На передней стенке робота расположены также электровыключатель экстренной остановки (продублированный на задней стенке), сигнальная лампа – вспышка и сигналы поворота.

Рисунок 2.4. Медицинский робот HelpMate
На заднюю стенку робота выведены устройства считывания карты местности: клавишная панель, переключатель вида работ, шкаф для лотков с пищей и ниша для аккумуляторов.
Стратегия преодоления препятствий решается с помощью бортовой ЭВМ на базе составленной карты местности. Данные, полученные с датчиков первичной информации, логически обрабатываются и выводятся на карту местности. Датчики сканируют местность спереди передвигающегося робота, так что в случае появления препятствия робот по сигналам с датчиков останавливается. В течение нескольких минут ЭВМ обрабатывает данные и подтверждает наличие преграды. Если препятствие движется, то робот ожидает до тех пор, пока оно не исчезнет. Если же объект стоит неподвижно, то робот начинает маневрировать в целях обхода препятствия сбоку. Все процессы маневрирования записываются в память машины. В случае неудачи все записанные параметры маневрирования сравниваются с истинным положением робота и проводится корректировка программы и системы управления. Время обучения мобильного робота передвижению в автономном режиме зависит от сложности маршрута, размеров коридоров и дверных проёмов в больнице.
Помимо робота Helpmate в США разработана госпитальная роботизированная система Robotek упрощенной конструкции и меньшей стоимости.
В Канаде ведутся исследования по созданию медицинского мобильного робота автономного управления с высокими тактико-техническими характеристиками. В целях обеспечения высокой функциональной надежности система управления робота оснащена резервной системой управления, а также системой самодиагностики, способной в автоматическом режиме определять отказы в системе управления и их причины.
В Японии для транспортировки лежачих больных в пределах госпиталя разрабатывается медицинская мобильная робототехническая система, представляющая собой дистанционно управляемую транспортную тележку. Робот оснащен устройством для перекладки больного с больничной койки на транспортировочное средство, состоящей из доски с крепежными мягкими ремнями вверху и внизу. Это подвижное устройство может перемещаться между пациентом и его коечным матрацем и позволяет самому больному передвигаться на доске, которая подвешивается на роботе в двух местах, позволяющих ей принимать конфигурацию кресла.
По мнению экспертов Japan Industrial Robot Association (JIRA), японский рынок госпитальных мобильных роботов возрос с 1000 в 1995 году до 3200 в 2000 г.
За последние годы повысился интерес к мобильным госпитальным роботам и в ряде европейских стран. Во Франции и Италии ряд ведущих робототехнических и электронных компаний включились в разработку роботизированных систем для транспортировки продуктов, как в госпитале, так и в офисе. Ведутся работы по созданию роботов для эвакуации раненых из зон природных и техногенных катастроф.
Клинические роботы предназначены для решения трех главных задач: диагностики заболеваний, терапевтического и хирургического лечения.
Ряд существующих диагностических систем с изображением на экране исследуемой области (например, томографический прибор, управляемый от ЭВМ), уже использует элементы мехатроники и робототехники. Предполагается, что массовое появление медицинских приборов различного назначения, управляемых ЭВМ, окажет сильное влияние на врачебную практику.
В Японии запатентован микроманипулятор, предназначенный для проведения медицинских и биологических исследований на клеточном уровне, позволяющий измерять электрическое сопротивление клетки, делать микроинъекции в клетку медицинских препаратов и ферментов, менять конструкцию клетки и извлекать ее содержимое.
Другой областью применения роботов является радиотерапия, где они используются в целях понижения уровня радиационной опасности для медицинского персонала. Использование роботов считается наиболее целесообразным при проведении замены нескольких дорогостоящих стационарных радиоактивных источников во многолучевых установках. Разработка манипуляторов для радиотерапевтических отделений находится в экспериментальной фазе. На этой же фазе находятся работы по созданию робота – массажера (мехатронные системы для массажа рассмотрены в гл.4).
Существует ряд сложных хирургических операций, выполнение которых сдерживается отсутствием опытных хирургов, поскольку такие операции требуют высокой точности исполнения. Например, в микрохирургии глаза существует такая операция, как радиальные разрезы роговой оболочки (radial keratotomy), с помощью которой можно корректировать фокусное расстояние глаза при устранения близорукости. Идеальная глубина надреза оболочки глаза должна не превышать 20 мкм. Опытный хирург при проведении этой операции может выполнять надрезы на глубину 100 мкм. В Канаде разрабатывается медицинский робототехнический комплекс, способный делать высокоточные надрезы на глазной роговице и обеспечивать нужную кривизну глаза. Другим примером исполнения хирургических операций высокой точности является микронейрохирургия. В Великобритании уже разработан медицинский робот для микрохирургии мозга.
В настоящие дни телеробототехнические системы чрезвычайно востребованы в медицине. Например, создан ряд устройств для точной хирургии (микро- или оптической), а также для малоинвазивной хирургии, главным достоинством которой является минимальная площадь проникновения внутрь тела для проведения операций на внутренних органах. Одно из главных преимуществ телеробота перед человеком-хирургом состоит в том, что использование двух манипуляторов, не связанных между собой механически, позволяет, например, устранить вибрацию человеческой руки, которая управляет мастер-роботом. Также, во время многочасовых операций хирург находится в удобном кресле и следит за ходом операции по видеокамерам на специальном терминале перед ним, а не стоит над хирургическим столом, что требует значительно больших физических затрат.
Созданный в США медицинский робот с манипулятором «Пума» продемонстрировал возможность извлечения кусочка ткани головного мозга для проведения биопсии. С помощью специального сканирующего устройства с трёхмерной системой отображения информации определялись место и скорость ввода двухмиллиметрового сверла для забора образцов мозговой ткани.
Во Франции разрабатывается медицинский робот – ассистент для оказания помощи при проведении хирургических операций на позвоночнике, когда любая ошибка хирурга может привести к полной парализации пациента. В Японии созданный медицинский робот продемонстрировал возможность трансплантации роговицы глаза, взятой у мертвого донора.
К достоинствам медицинских роботов относится их способность воспроизводить требуемую последовательность сложных движений исполнительных инструментов. В Великобритании продемонстрирован медицинский робот – тренажер для обучения врачей и моделирования процессов хирургических операций на простате, в ходе которых производится серия сложных надрезов в различных направлениях, последовательность исполнения которых трудна для запоминания и выполнения.
В США запатентована роботизированная система для помощи хирургу при выполнении операций на костях. Данная система применяется в ортопедических операциях, при которых важнейшим является точное позиционирование инструмента относительно коленного сустава. Роботизированная система состоит из операционного стола, неподвижного устройства, робота, контроллера и супервизора. Пациент размещен так, чтобы бедро было неподвижно закреплено внутри устройства. Другое бедро пациента закреплено к операционному столу ремнями.
Основание робота прочно закрепляется на операционном столе. Инструмент устанавливается на роботе, манипулятор которого может перемещаться имея 6 степеней подвижности. Манипулятор содержит позиционно – сенсорное устройство для выработки сигналов, указывающих положение манипулятора относительно координатной системы. В составе робота используется серийный манипулятор PUMA 200, который благодаря своей относительной простоте легко адаптируется к хирургическим операциям. Контроллер отслеживает все все движения робота и передает их на супервизор. Команды на перемещения и управление вспомогательными операциями, вырабатываемые контроллером, передаются роботу сигналами позиционирования, поступающими по соединительным кабелям.
Существует несколько способов управления движением робота. При изготовлении робот оснащается дополнительным устройством с учебной программой. Устройство для обучения представляет собой прибор с полуавтоматическим управлением маневрированием робота. Маневрирование состоит из серии отдельных шагов – перемещений. Контроллер записывает эти шаги так, чтобы робот мог затем сам повторить их. Для управления роботом могут применяться речевые команды или другой тип управления. Робот может перемещаться и пассивным образом, для чего в манипуляторе предусмотрено ручное управление движением.
Супервизор, так же как и контроллер, обеспечивается управляющими командами и программами на языке VAL – 11. При работе с супервизором все команды на движение проходят через контроллер. Перед дисплеем устанавливается специальный экран, известный под торговой маркой «Touch window» (TSW), который используется в качестве прибора для ввода команд в процессе операции. Все изменения на кости отображаются на экране монитора. В операционной этот экран покрывается стерильной пленкой, что позволяет хирургу непосредственно управлять хирургическим операционным процессом. Программы операций базируются на геометрических соотношениях между параметрами протеза, параметрами костных разрезов и осями сверления отверстий. Робот будет перемещать инструмент по определенным позициям в соответствующих плоскостях. Началом системы координат будет некоторая фиксированная точка на опорной поверхности.
В последние годы в области автоматизации хирургических процессов появились сообщения о попытках создания роботизированных систем для дистанционной хирургии с помощью телевизионных установок, когда хирург и пациент разделены большими расстояниями.
К числу наиболее актуальных задач относится диагностика и хирургия сосудистых заболеваний. В Японии, Италии, России ведутся работы по созданию мобильных микророботов, предназначенных для разрушения атеросклеротических отложений в кровеносных сосудах. Предполагается, что мобильные микророботы будут работать в автоматическом режиме, перемещаясь по анатомическому руслу кровеносной системы.
В настоящее время в МГТУ им. Н.Э. Баумана ведутся работы по созданию роботизированной системы, позволяющей решать эти задачи. Система включает артериальный носитель – микроробот, способный перемещаться по кровеносному руслу и оснащенному ультразвуковым микродатчиком, а также необходимым рабочим инструментом. Функциональная схема этой системы приведена на рис.2.5. Хирург – оператор, получая информацию о состоянии сосуда, имеет возможность с помощью микроробота осуществлять процедуры как медикаментозного, так и хирургического характера.
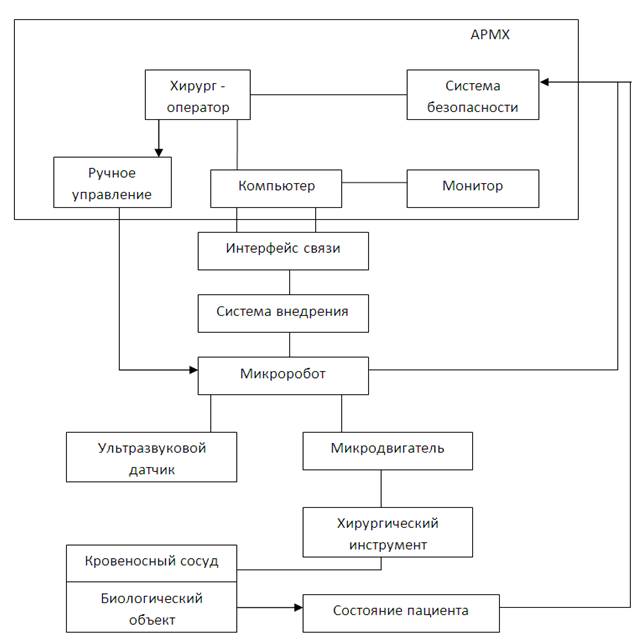
Рисунок 2.5. Функциональная схема робототехнической системы для внутрисосудистой диагностики и хирургии
В Канаде проводятся экспериментальные исследования телеоператора – робота для лапароскопических операций. Новая медицинская технология основана на применении миниатюрной камеры и специальных инструментов, вводимых через брюшную стенку. Видеоизображение передается на монитор, и ассистент координирует движения оперирующей группы в заданном направлении. Положение миниатюрной видеокамеры в брюшной полости координируется с помощью манипулятора, управляемого хирургом.
В США в 2006 году были успешно проведены испытания хирургической робототехнической системы, главным назначением которой является проведение операций непосредственно на поле боя над солдатами, нуждающимися в немедленном хирургическом вмешательстве. Слэйв-робот перевозится транспортом и находится на расстоянии от нескольких сот метров до нескольких километров от места ведения боевых действий в недосягаемости врага. Солдат, получивший ранение, доставляется к роботу, а операцию проводит врач-хирург, находящийся в операционной на расстоянии до нескольких километров от самого слэйва. Видеосигналы от слэйва к хирургу и управляющие сигналы от хирурга к слэйву передаются с помощью беспилотных летательных аппаратов (БПЛА). Как говорилось выше, данная телеробототехническая система отлично показала себя в ходе полевых испытаний.
Робот-хирург «da Vinci» — аппарат для проведения хирургических операций (рис. 2.6.).
Производится серийно компанией Intuitive Surgical. Установлен в нескольких сотнях клиник по всему миру. Состоит из двух блоков, один предназначен для оператора, а второй — четырёхрукий автомат — выполняет роль хирурга. Масса аппарата — полтонны. Врач садится за удобный пульт, который даёт возможность видеть оперируемый участок в 3D с многократным увеличением и использует специальные джойстики, чтобы управлять инструментами.


Рисунок 2.6. Хирургический телеробот daVinci
Выполняемые операции с применением робота Да Винчи
· Восстановление митрального клапана
· Реваскуляризация миокарда
· Абляция тканей сердца
· Установка эпикардиального электронного стимулятора сердца для бивентрикулярной ресинхронизации
· Желудочное шунтирование
· Фундопликация по Nissen
· Гистерэктомия и миомэктомия
· Операции на позвоночнике, замена дисков
· Тимэктомия - операция по удалению вилочковой железы
· Лобэктомия легкого
· Эзофагоэктомия
· Резекция опухоли средостения
· Радикальная простатэктомия
· Пиелопластика
· Удаление мочевого пузыря
· Радикальная нефрэктомия и резекция почки
· Реимплантация мочеточника
У роботизированной хирургии есть существенный недостаток, который выражается в отсутствии обратной связи – хирург просто не чувствует, какое усилие инструмент прикладывает к тканям оперируемого. Устранить эту проблему призвана новая система Sofie (Surgeon’s Operating Force-feedback Interface Eindhoven), разработанная Линдой ван ден Бедем (Linda van den Bedem) из Университета технологий Эйндховена (Eindhoven University of Technology, TU/e).
Sofie управляется при помощи джойстиков на контрольной панели, необходимое усилие воздействия на манипуляторы регулируется в зависимости от приложенного инструментами давления. Такая система может быть особенно полезна для задач вроде накладывания швов, поскольку хирург сможет точно определить, насколько сильно манипулятор тянет нить (рис. 2.7.)

Рисунок 2.7. Инновационный робот-хирург Sofie
Разработка голландской ученой гораздо компактнее большинства других хирургических роботов – Sofie закрепляется на операционном столе, а не на полу. Это означает, что при перемещениях или наклонах стола не нужно заново регулировать «хирурга».
Отметим, что клинические робототехнические системы являются эргатическими т.е. функционируют при участии оператора. Высокий уровень технологий позволяет существенно расширить возможности оперативного вмешательства. Примером может служить дистанционно управляемая манипуляционная система для проведения операций на сердце. В последнем случае хирург получает возможность проводить операции с разрешением, в 2-3 раза меньшим, чем позволяет его рука при непосредственной работе с инструментом. Следует подчеркнуть, что подобного рода операции возможны только при достаточно высоком уровне информационных технологий, использовании активного интерфейса и экспертных систем, обеспечивающих диалог хирурга с робототехнической системой на протяжении всей операции, контролирующих его действия и предотвращающих возможные ошибки. Наряду с непосредственным управлением движением мини – манипуляторами и микророботами с помощью органов ручного управления хирург имеет возможность использовать речевые команды для управления как рабочим инструментом, так и средствами информационного обеспечения. Таким образом, использование клинических робототехнических систем позволяет не только отказаться в ряде случаев от традиционных медицинских технологий, но и существенно облегчить условия труда хирурга и врача – диагноста.
Из вышеизложенного следует, что медицинская мехатроника находится в состоянии быстрого подъема, темпы которого значительно выше, чем в традиционных областях мехатроники. Вместе с тем необходимо упомянуть и о факторах, сдерживающих применение мехатронных устройств в медицинской практике, которые справедливы не только для России, но и для всех развитых стран. Важнейшим среди них является психологический фактор, связанный с дегуманизацией медицинского обслуживания и проявляющийся не только со стороны пациентов, но и со стороны медицинского персонала. Этот фактор вызывает отторжение идеи применения мехатроники для столь деликатной сферы, как организм человека. Его преодоление требует отношения к мехатронике, в первую очередь, как к средству, инструменту медицинской практики врача, хирурга. Необходимо обратить внимание на обеспечение надежности мехатронных систем и их безопасность для пациента.
Другим сдерживающим фактором является разобщенность и неполное взаимное понимание специалистов в области техники и медицины. Это обстоятельство требует подготовки специалистов нового типа, владеющих не только инженерными знаниями, но и хорошо знакомыми с особенностями медицинских технологий. Необходимо обратить внимание на тот факт, что в настоящее время еще не сложилась в полной мере биотехническая методология, предусматривающая системный подход к проектированию мехатроных медицинских систем.
Наиболее трудноразрешимая задача, возникающая при проектировании медицинских мехатронных систем, заключается в согласовании между собой отдельных элементов системы. При этом можно выделить следующие условия совместимости:
1. биофизическая совместимость характеристик биологического объекта и технических элементов мехатронной системы;
2. информационная совместимость мехатронной системы и оператора системы;
3. эргономическая совместимость мехатронной системы по отношению как к оператору, так и к пациенту;
4. психологическая совместимость технической части системы с оператором и пациентом.
Соблюдение этих условий позволит уже в ближайшее время преодолеть факторы, сдерживающие широкое применение мехатронных систем в медицинской практике.
Области применения микророботов в медицине включают различные сенсорные приспособления для сердечно-сосудистой системы, приспособления для доставки к тканям лекарственных препаратов, различные маркеры, искусственные сфинктеры, вспомогательные насосы (для поддержания сердечной деятельности), венозные или сердечные клапаны, самоочищающиеся фильтры, подвижные перемычки, приспособления для забора ткани для гистологического исследования и самонаводящиеся микроскопы. Одним из самых интересных достижений в настоящее время являются так называемые «умные» микророботы-эндоскопы.
У существующих на сегодняшний день фиброволоконных эндоскопов, папример видеоколоноскопов, есть несколько недостатков. Они длинные и громоздкие, для работы о ними требуется значительный опыт, они неудобны для пациентов и при работе с ними постоянно существует риск перфорации стенки желудочно-кишечного тракта. Микроробот-видеокол оное коп представляет собой независимый «умный» подвижный эндоскоп, который может двигаться самостоятельно по просвету ободочной кишки, достигая слепой кишки. В процессе продвижения по кишке этот мнкроробот-колопоскоп осуществляет видеосъемку, которая затем просматривается оператором.
Разрабатываются такие микророботы-колоноскопы в течение последних 3 лет сотрудниками кафедры хирургии Национального университета совместно с сотрудниками кафедры электрического и электронного оборудования Национального технологического университета в Сингапуре. Этот проект получил развитие после создания робота-«мышки», который мог проходить по лабиринту во время межуниверситетских соревнований. Такие роботы-«мышки», создаваемые в Национальном технологическом университете, всегда побеждали в подобных соревнованиях. При этом идея развивалась дальше, и ученые пришли к мысли о создании аналогичных «мышек», которые могли бы проходить через сложные изгибы ободочной кишки.
Первыми моделями таких микророботов-«мышек» были телеоператорские модели — простые перемещающиеся роботы с зафиксированными на них CCD-камерами. Эти роботы управлялись вручную при помощи дистанционного пульта.
Робототехники во всем мире изобретают целое семейство крошечных устройств для различных задач.
Приведем некоторые из наиболее инновационных проектов.
Для лечения пострадавших от инсульта людей в нынешнее время применяют целый ряд сложных хирургических операций, таких как укрепление стенок артерий, блокировка кровообращения в поврежденных артериях и многие другие. Для этих операций используется специальное хирургическое оборудование, такое как зонды и микротрубки, применение которых практически всегда связано с риском для пациента и не всегда возможно в связи со сложностью кровеносной системы человека. В недалеком будущем все эти операции могут стать намного безопаснее, чем в нынешнее время.
Это будет возможным благодаря работе исследователей во главе с профессором Джеймсом Френдом (James Friend), из лаборатории Микро и Нанофизики университета Монаш в Австралии (Micro/Nanophysics Research Laboratory at Australia''s Monash University). Они разработали проект и прототип микроробота, который имеет очень малые габариты и благодаря этому может быть введен в кровеносную систему человека.
Эти миниатюрные роботы, передвигающиеся внутри артерий по командам, получаемым от дистанционного управления, могут спасти немало человеческих жизней, достигая таких участков кровеносной системы как, внутричерепные артерии, которые были ранее недоступны из-за лабиринтообразной структуры кровеносной системы мозга в случае использования традиционных хирургических методов. Также, с помощью дополнительных медицинских приспособлений, укрепленных на поверхности микроробота, может быть произведена операция очистки артерий и, следовательно, быть увеличена их пропускная способность. Микророботы могут выполнять еще целый ряд медицинских операций необходимых для лечения сосудов поврежденной кровеносной системы, к примеру, благодаря тому, что они могут нести внутри себя некоторый полезный груз, микророботы смогут также производить укрепление стенок кровеносных сосудов с помощью специальных материалов (рис. 2.8.).

Рисунок 2.8. Медицинский микроробот, передвигающийся внутри человеческих артерий
В результатах научно-исследовательской работы, опубликованной 20 января 2009 года, исследователи утверждают, что им удалось создать микророботов с размером в 250 микрометров в ширину. Это стало возможным с применением микроэлектродвигателей, использующих для движения пьезоэлектрический эффект. Теперь ученые работают над улучшением конструкции робота с целью упрощения процессов его производства и сборки.
Управляемый хирург (рис. 2.9).
Ведущий инженер: Брэд Нельсон, Швейцарский федеральный технологический институт, Цюрих, Германия.
Конструкция: 3-D инструмент собран из плоских никелевых деталей.
Рисунок 2.9. Макет робота-хирурга
Источник питания: внешние электромагнитные катушки.
Рулевой механизм: градиентное магнитное поле.
Отслеживающие устройства: микроскоп.
Размер: (длина): 1 мм.
Применение: операции на сетчатке глаза, медикаментозная терапия при глазных болезнях.
Статус: навигация была протестирована в глазах кроликов.
Робот-таблетка (рис. 2.10).
Рисунок 2.10 Макет робота-таблетки
Ведущий инженер: Паоло Дарио, Scuola Superiore Sant'Anna, Пиза, Италия.
Конструкция: капсула содержит магнит, камера, беспроводной чип, и набор механических ногах.
Источник питания: двигатели постоянного тока, магниты вне тела.
Рулевой механизм: градиент магнитного поля.
Отслеживающие устройства: камеры, беспроводные системы телеметрии.
Размер (длина): 2 см.
Применение: Диагностика болезней желудочно-кишечного тракта.
Статус: Визуальный осмотр кишечника свиньи.
Микроробот для удаления артеросклерозных бляшек (рис. 2.11).
Ведущий инженер: Jong-Oh Park, Чоннам национальный университет, Южная Корея.
Конструкция: магнитные капсулы оснащены микро буровой головкой.
Источник питания: электромагнитные катушки.

Рисунок 2.11. Микроробот для удаления артеросклерозных бляшек
Рулевой механизм: градиент магнитного поля.
Отслеживающие устройства: МРТ и рентгенография.
Размер: (длина): 10 мм
Применение: удаление бляшек в артериях
Статус: Прототип в настоящее время разрабатывается.
Микророботы-бактерии (рис. 2.12).
Ведущий инженер: Метин Sitti, Университет Карнеги-Меллона в Питтсбурге.
Конструкция: Бактерии самостоятельно прикрепляются к полимерным гранулам.
Источник питания: Жгутики живых бактерий
Рулевой механизм: Градиенты химических веществ, температуры, кислотности.
Отслеживание устройства: флуоресцентные или рентгеновские установки.
Рисунок 2.12. Микроробот-бактерия
Размер: (диаметр): 55 мкм.
Применение: диагностика заболеваний и доставка лекарственных средств
Статус: Химическая навигация была протестирована в лаборатории.
Микроробот-пловец со «штопором» (рис. 2.13).
Ведущий инженер: Джеймс Френд, Королевский технологический институт Мельбурна, Австралия.
Рисунок 2.13. Микроробот для исследования кровеносных сосудов
Конструкция: капсула содержит пьезоэлектрический поворотный двигатель, который «хлещет» хвостом
Источник питания: беспроводная передача электроэнергии.
Рулевой механизм: пьезоэлектрические колебания.
Отслеживание устройства: рентгенография.
Размер: (диаметр): 250 мкм.
Применение: исследование сосудов.
Статус: Испытания в лабораторных условиях.
Большие надежды возлагаются на применение нанороботов в хирургии. При этом нанороботы также вводятся в кровоток и затем осуществляют поиск пораженной ткани и коррекцию дефектов за счет манипулирования на наноуровне. Первые данные о применении нанороботов для хирургических нужд свидетельствуют о перспективности данного метода. Так, например, фемтосекундный лазер представляет собой «нано-ножницы», с помощью которых осуществляются тончайшие манипуляции на уровне внутриклеточных структур. Такой эффект достигается за счет испарения нанообъемов ткани без какого-либо повреждения соседних участков ткани. Уже имеется опыт использования фемтосекундного лазера для препарирования микротрубочек в клетках дрожжей (Sacconi et al., 2005) и нанохирургии отдельных хромосом в живой яйцеклетке путем избирательного удаления определенных участков генома (Konig et al., 1999). Существенным моментом является то, что эти процедуры не влияют на жизнеспособность клеток, в которых они выполняются.
В будущем прогнозируется создание нанороботов, способных осуществлять мельчайшие манипуляции на ультраструктурном уровне, невыполнимые рукой самого искусного микрохирурга.
3. МЕХАТРОННЫЕ СИСТЕМЫ РЕАБИЛИТАЦИИ
3.1. История аппаратной физиотерапии
В последние годы ведущие страны мира ведут активную работу в области создания реабилитационных систем для пациентов, перенесших инсульты, травмы или хирургические вмешательства, повлекшие за собой нарушения двигательных функций. Одним из перспективнейших направлений в этой сфере является разработка мехатронных устройств, сочетающих в себе узлы точной механики, сенсорные системы очувствления и интеллектуальные блоки управления. Такие устройства способны не только облегчить труд врача-физиотерапевта, но и существенно расширить его возможности, позволяя имитировать естественные движения человека, подбирать индивидуальные программы для каждого пациента, осуществлять непрерывный контроль за его состоянием во время процедур. Частным случаем таких инновационных разработок являются устройства для реабилитации локтевого сустава. Существующие зарубежные аналоги обладают рядом недостатков, главным из которых является отсутствие возможности осуществлять одновременно сгибание/разгибание и пронацию/супинацию, как это происходит при естественных движениях, и, кроме того, имеют высокую стоимость
Методы реабилитации и физиотерапии уходят корнями в глубокую древность. Так, с воздействием электрического разряда наши предки - первобытные люди сталкивались, когда, скажем, ловили в мелких лагунах рыбу. Будучи наблюдательными и любопытными, они заметили, что после таких "встрясок" иногда начинали двигаться до того парализованные пальцы, проходило их онемение, уменьшались боли. Постепенно они преднамеренно искали встречи с "исцеляющей" рыбой, загоняли ее в ловушки, чтобы с ней соприкоснуться. При описании возможностей аппаратной физиотерапии и электролечения также небезынтересно вспомнить о весьма курьезном событии, связанном с открытием лечебных свойств электричества. Хотя исполнилось примерно два столетия с момента открытия гальванического тока и его применения в медицине, тем не менее, как это ни забавно, электричество нашло применение в лечебных целях еще в Древнем Риме около 2000 лет тому назад. И, судя по историческим сведениям, вполне возможно, что причинным фактором головных болей, по поводу которых назначалось лечение электричеством, являлась гипертоническая болезнь.
История повествует, что жестокий тиран император Древнего Рима Нерон (54-68 гг. н. э.) страдал упорными головными болями неизвестного происхождения. Правитель был грузным от обжорства и обильных возлияний, и, по-видимому, ему были неведомы в ту пору факторы риска атеросклероза и он пренебрегал ими. Так вот, Нерон оказался одним из первых пациентов, принимавших электролечение. Греческий врачеватель Диоскуридий лечил его разрядами (!) природного происхождения от... электрического ската.
Механотерапия (mechanotherapia; механо- + терапия) - метод лечебной физкультуры, основанный на выполнении дозированных движений (преимущественно для отдельных сегментов конечностей), осуществляемых с помощью механотерапевтических аппаратов, облегчающих движения или, наоборот, требующих дополнительных усилий для их выполнения.
Механотерапия предназначается для избирательного воздействия на определённые функции двигательной системы человека.
Выделены четыре основные группы аппаратов(тренажёров) механотерапии:
1. Диагностические аппараты – для учёта и точной оценки успеха двигательного восстановления;
2. Поддерживающие, фиксирующие аппараты – для восстановления отдельных фаз произвольных движений;
3. Тренировочные аппараты – для дозированной механической нагрузки при движении;
4. Комбинированные аппараты – они состоят из первых трёх групп.
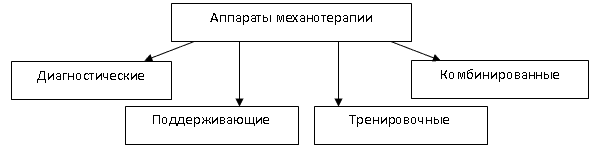
Рисунок 3.1. Классификация аппаратов механотерапии
В числе аппаратов первой диагностической группы: угломеры, динамометры, лесенки и др. Для фиксации различных частей конечностей служат разнообразные фиксаторы. К третьей группе относятся параллельные брусья, аппараты для разработки движений, гимнастические тренажёры, опорные аппараты и др. В настоящее время, множество конструкций предложено для комбинированных аппаратов механотерапии, выпускаемых современной медицинской промышленностью в России и за рубежом.
Механотерапия успешно применяется при последствиях травм, заболеваниях нервной системы и опорно-двигательного аппарата с остаточными нарушениями функции (тугоподвижность, контрактуры, фиброзный анкилоз и др.)
Начинают процедуры с малых физических нагрузок, особенно при наличии активности процесса. Механотерапия может совмещаться с лечебной гимнастикой, но занятия чаще чем 2 раза в неделю не целесообразно из за снижения биопотенциала мышц в следствии утомления. Величина физической нагрузки и частота процедур обуславливаются в основном характером и течением патологических процессов. Механотерапевтической процедуре предшествуют различные виды физиолечения (парафин, лекарственный электрофорез, диадинамический ток, УВЧ, и др.) С последующим ручным или вибрационным сегментарным массажем.
Более чем 100 лет назад шведский врач Густав Дж. Зандер (1835-1920 гг.) представил «медико-механическую терапию» как новую ветвь все еще новой дисциплины «шведская физиотерапия», созданной П.Х. Лингом (1776-1839 гг.). Зандер изобрел многочисленные, зачастую оригинальные механические системы для проведения активных и пассивных упражнений. В 1865 году в Стокгольме он основал первый институт медико-механической терапии. Его машины (рис. 3.2.) предназначались для укрепления мышц, улучшения циркуляции крови и координации движений, устранения тугоподвижности суставов и в то же время для снижения физической нагрузки на врача и физиотерапевта.
Традиционные методы часто требовали от терапевта обеспечивать физическое сопротивление при выполнении пациентом иногда сложных последовательностей упражнений. Это могло привести к быстрому появлению усталости и натолкнуло Зандера на мысль попробовать разработать устройство, обеспечивающее механическое, регулируемое сопротивление, которое бы управляло движениями пациента так же точно, «как медикаментозное лечение». Зандер, занимаясь по системе Линга, отметил, что в гимнастике противодействия дозирование нагрузок всецело зависит от методиста, что не способствует объективности лечения. В 1857 году он разработал специальные аппараты из кожи, дерева и металла, которые давали возможность точно дозировать упражнения для определенных групп мышц. Каждый из аппаратов был предназначен для выполнения строго определенных движений. Аппараты для активных движений были построены по принципу 2-х плечевого рычага: одно плечо служит точкой приложения сил, на другом находится груз, смещение которого регулирует сопротивление. Аппараты для пассивных движений приводились в действия электротоком и заставляли больного производить определенные движения без усилий с его стороны. Некоторые аппараты предназначались для массажа (вибрационного, трением, поколачиванием). Специальные аппараты были предназначены для вытяжения позвоночника у детей со сколиозами.
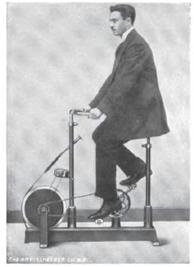


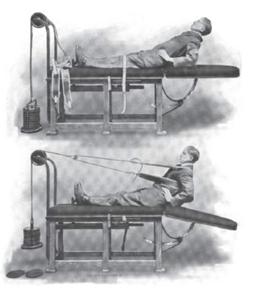
Рисунок 3.2. Механотерапевтические устройства Густава Зандера
По инициативе Зандера в 1865 году в Швеции был основан медико-механический институт, где проводились исследования влияния физических упражнений на различные отклонения в опорно-двигательном аппарате человека. В свою очередь залы лечебных учреждений, в которых были установлены такие аппараты, получили название «механических институтов Зандера» и вскоре стали принадлежностью каждого благоустроенного курорта.
Оказывается, идея приводить машины в движение при помощи «парового, бензинового или электрического двигателя» с самого начала играла важную роль.
Из работ Шютца мы знаем, что уже в 1868 году Зандер приобрел небольшой паровой двигатель для приведения в движение аппаратов для пассивной разработки суставов. Тот же автор подчеркивал, что при лечении нельзя полагаться только на использование машин, нужно делать и множество упражнений других видов.
В Германии Г. Небель, который руководил Институтом Зандера во Франкфурте-на-Майне, отвечал за продвижение и распространение так называемой «гимнастики Зандера». Согласно Томанну, Зандер полагал, что упражнения при помощи машин можно производить «рационально», то есть чтобы последовательность движений была воспроизводимой.
У Зандера было несколько подражателей, которые пытались разработать более простые и более дешевые машины и даже внесли в них некоторые усовершенствования. В начале 20 века швейцарский врач Чарльз Шолдер (1861-1918 гг.), основатель частного медико-механического и ортопедического института в Лозанне, разработал так называемый «Arthromotor» (1904/05). Даже по сегодняшним стандартам эта машина обладала выдающимися характеристиками: она позволяла производить пассивные и активные движения, точно устанавливать диапазон движений, регулировать количество движений в минуту и могла подстраиваться под изначальное положение травмированной конечности. «Arthromotor» мог выполнять функции множества отдельных машин, которые до того момента могли использоваться только по отдельности и за счет больших материальных затрат (рис. 3.3.). Автор справедливо настаивал на том, что пациенты не должны довольствоваться простым залечиванием травмы.
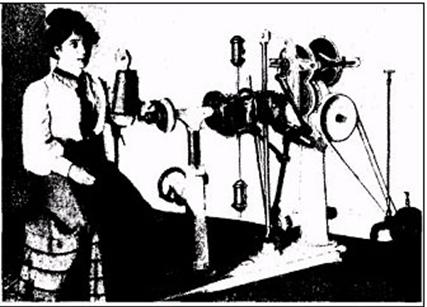
Рисунок 3.3. Аппарат Arthromotor
Хороший функциональный результат был даже более важен. При помощи аппарата «Arthromotor» его можно было достичь путем значительной экономии времени, что приносило пользу не только пациенту, но и страховым компаниям и профессиональным торговым ассоциациям. Оригинальный аппарат Шолдера вызывает восхищение, как и многие из его наблюдений, которые актуальны даже сейчас. Его «Arthromotor» не только интересным образом схож с системой «Artromot», но и является вехой на пути разработки современных оснащенных мотором двигательных устройств.
После первой мировой войны широко распространенный энтузиазм по поводу новых методов терапии медленно шел на убыль. Причины этого спада были сложными. Иногда результаты не отвечали ожиданиям, например, при лечении сколиоза, но кроме этого произошла общая смена мировоззрения: большую роль сыграли новые методы лечения, социальное и политическое развитие общества, а также финансовая ситуация (учитывая высокую стоимость аппаратов Зандера). Наконец, Руттиманн в своей превосходной статье "Die Orthopadie der Maschinen und der Privatinstitute" размышляет о том, что и другие факторы могли повлечь за собой упадок медико-механической терапии, а именно изменение контингента пациентов и методов лечения, раздражающий фоновый шум, производимый грохочущими и скрипящими машинами, а также недостаток места в клиниках и институтах. Для полностью оборудованной «комнаты Зандера» требовалось по крайней мере 300 м2!
В 1926 году в Копенгагене Римке задумал новый «метод мобилизации суставов после травм»: Он соорудил аппарат, который можно было использовать в первый день после операции при повреждениях суставов после травм, инфекций и операций и который производил движения так медленно, что они были незаметны для пациента. Римке рекомендовал начинать лечение с очень узкого диапазона движений, полагая, что достаточно полностью разогнуть конечность один раз в день, чтобы предотвратить ухудшение подвижности сустава. Терапия не должна была сопровождаться «чем-то даже очень отдаленно похожим на те суровые боли, которые присущи некоторым другим методам лечения». Чрезвычайно медленные и мягкие движения и предоставляемая пациенту возможность «в полной мере управлять» аппаратом самостоятельно внушали уверенность. Автор также призывал начинать активные движения, как только это становится возможным после операции, - установка, сходная с сегодняшними принципами реабилитации.
Идея производить мобилизацию тугоподвижных суставов, оказывающую мягкое воздействие на пациента, также побудила Лохе представить свое оснащенное мотором двигательное устройство в 1928 году в Мюнхене. Можно было точно регулировать силу и скорость работы мотора. Боль исключалась при любых обстоятельствах. И впервые большое внимание было уделено совпадению осевых линий человеческого и механического суставов!
Таким образом, в работах Римке и Лохе, написанных более 60 лет назад, содержались некоторые принципы, которые должны были бы применяться в СРМ-терапии Зальтера, но в то время их статьи не смогли остановить общий отход от медико-механической терапии.
После второй мировой войны в послеоперационной реабилитации начала доминировать философия покоя.
Противоречивые взгляды на лечение пораженных болезнью или травмированных суставов появились еще в начале двадцатого века, и споры на тему относительных преимуществ покоя над движением и пассивных упражнений над активными продолжаются до сих пор. В 1923 году, к примеру, Хегланд писал, что нужно избавиться от той «безумной идеи», что опасно «позволять суставу оставаться в состоянии покоя, и что поэтому пассивная разработка сустава используется для сохранения диапазона движений». Он продолжал: «Ничто не может быть дальше от правды». В соответствии с его взглядами, до последнего времени рекомендовалось на несколько дней обездвиживать плечевой сустав при помощи фиксирующего корсета на груди после мобилизации под наркозом. Важные вопросы, касающиеся манипуляций с суставами, до сих пор являются предметом споров, хотя давно известно, что длительная иммобилизация отрицательно влияет на питание суставного хряща, состояние мягких тканей и циркуляцию крови.
Некоторое время назад произошла смена взглядов в пользу функционального подхода. В начале 1970-х годов Р.Б.Зальтер начал свои экспериментальные исследования, которые помогли устранить все оставшиеся сомнения относительно выбора между покоем и двигательной терапией. Он выдвинул новую гипотезу: исходя из биологических данных, пассивная разработка сустава лучше для заживления всех тканей сустава, включая хрящ, связки и соединительные ткани. Пассивная разработка предотвращает анкилоз сустава лучше, чем прерывистые движения и даже чем иммобилизация сустава.
С этими размышлениями и связано рождение СРМ-терапии.Теория Зальтера, касающаяся преимуществ продолжительной пассивной разработки суставов на ранней стадии после операции, была подтверждена множеством экспериментальных исследований, продолжавшихся более 10 лет.
При помощи «биологических моделей» Зальтера можно было продемонстрировать следующее:
- Дефекты плотности гиалинового хряща срастались значительно быстрее иболее полно при применении СРМ-терапии, чем при иммобилизации сустава или при прерывистой двигательной терапии. Происходила быстрая трансформация недифференцированной мезенхимы в гиалиновый хрящ. Зальтер определил, что первая неделя является самым важным периодом послеоперационной реабилитации.
- Разрывы хряща заживали более быстро; количество случаев появления спаек и посттравматических артрозов значительно сократилось.
- Улучшался метаболизм суставов.
- Атрофия мышц была гораздо менее резко выражена у пациентов, чьи суставы подвергались продолжительной пассивной разработке, по сравнению с теми, чьи конечности были закованы в гипс.
- В случаях острого септического артрита СРМ помогала предотвратить прогрессивное разрушение хрящевой ткани.
- Поврежденные в целях проведения эксперимента связки надколенника заживали более быстро. Увеличивалась прочность связок на растяжение, а коллагеновые волокна лежали более ровно. Мозоли, которые формировались на сухожилиях, были толще, чем после иммобилизации сустава или после прерывистых активных упражнений.
- Очень хорошие результаты были достигнуты также относительно рассасывания суставных кровоизлияний, пластики суставных связок и аутогенной трансплантации надкостницы при обширных повреждениях хряща.
- Отек околосуставных тканей быстро спадал.
Эти важные, а иногда и удивительные результаты привели в 1978 году к разработке оснащенных мотором двигательных шин для «одновременных упражнений для голеностопного, коленного и тазобедренного суставов, плечевого и локтевого суставов и суставов пальцев рук». Согласно работам Зальтера, эти машины начинали применяться сразу после операции и работали непрерывно по крайней мере в течение недели с циклом движений продолжительностью 45 секунд. Медленные, полнофункциональные движения поврежденного сустава почти не вызывали боли – как определил Римке со своим аппаратом в 1926 году; пациенты с энтузиазмом принимали новый метод терапии и в среднем быстро достигали хорошей подвижности суставов. Заживление ран не ухудшалось. Можно было снизить как срок пребывания в больнице, так и общее время реабилитации.
В начале 1980-х годов эти данные привели к расширению использования оснащенных двигателем тренажеров по всей Европе. Аппараты появлялись на индустриальных выставках, а в литературе начали появляться новые исследования. Хотя в некоторых кругах эти работы вызывали скептицизм, они, тем не менее, стимулировали разработку новых тренажеров почти для всех суставов конечностей.
В 1974 году Берри и др. вознамерились улучшить функциональный результат на ранней стадии после операции по поводу тотального эндопротезирования коленного сустава. Они больше не хотели мириться с тяжелыми осложнениями после операции, которые случались довольно часто. Они включали в себя анкилоз, атрофию мышц и повреждения хряща – и всё это из-за длительной иммобилизации сустава. Во время экспериментов на животных авторы определили, что «свободные движения коленного сустава в ограниченном диапазоне не влияли на заживление фиброзной ткани связок». Кроме того, они получили новые данные, касающиеся сшитых связок коленного сустава: если диапазон движений сводился к сгибанию от 20 до 60°, ни коллатеральные, ни крестообразные связки не натягивались.
Практическим результатом этих исследований стала так называемая двигательная шина, применение которой начиналось на пятый-шестой день после операции. Функциональный принцип послеоперационной реабилитации при лечении сложных повреждений связок колена получил новый импульс.
Без сомнения, «шина Берри» также может считаться предтечей СРМ-терапии. Берри указал на очень разумное решение дилеммы между предполагаемой необходимостью иммобилизации восстановленных связок для ускорения заживления и потребностью избежать осложнений, связанных с иммобилизацией, путем как можно более раннего начала двигательной терапии. Тем не менее, прежде чем достичь современного состояния СРМ-терапии, когда в большинстве случаев при таких повреждениях гипс после операции не накладывается, а сразу начинается пассивная разработка сустава, предстояло пройти еще долгий путь.
В течение многих лет единственными доступными тренажерами были различные аппараты для разработки коленного сустава. Тем не менее, эти аппараты – например, широко известные аппараты Kinetec – не могли обеспечить желаемую последовательность физиологичных движений, так как осевая линия шины аппарата, прилегающей к бедру пациента, не совпадала с осевой линией бедра пациента. Как следствие, чем сильнее сгибалось колено, тем дальше осевая линия бедра пациента отходила от осевой линии шины аппарата, и аппарат начинал «гулять». Поэтому реальный угол сгибания колена заметно отличался от запрограммированного.
В начале 1980-х годов в Германии появились первые аппараты для разработки плечевого и локтевого суставов, суставов пальцев рук, а позднее – и для тазобедренного сустава. Эти аппараты зачастую были несовершенными – громоздкими и дорогостоящими. В эти же годы Arthur Jones «заново открыл» тренажеры для занятий фитнесом. При этом, его обвинили в плагиате, поскольку созданные им тренажеры «Наутилус» и «MedX» во многом повторяли принципы аппаратов J.G.V.Zander. На обвинение Arthur Jones ответил: «Если бы я знал о работах Zander, это сэкономило бы мне немало времени, потому что этот человек был гением. Его проблема оказалась в том, что он жил, примерно, на столетие впереди своего поколения».
Сегодня рейтинг залов лечебной физкультуры и санаториев, фитнес-центров, физкультурно-спортивных клубов в значительной мере определяется их материально-технической оснащенностью - количеством и качеством тренажерных устройств. Разработка тренажеров является успешной промышленной отраслью, на которую работают многочисленные научные лаборатории. В производстве фитнес-тренажеров лидерами считаются такие бренды, как: Honda, Kettler, Body Sculpture, Alex, WNQ, Atemi, Winner, Stingrey, Hammer, Vision, Life Fitness, Proteus, Cy-bex, Ferrum, Finnlo, Johnson, Matrix, Novus, Precor, Torneo, Hoist, Vectra, Body Craft, Genesis, Gym 80, Body Strong, Body-Solid, Flex Fitness, CUMMINS, Hammer, Strength, Ica-rian-Precor, Icon, Parabody, Paramount, Personality Gym, Po-erBlock, Powertec, Lineatre. Тренажеры используют с разной целью: для контроля процесса восстановления (диагностические аппараты), для восстановления отдельных фаз произвольных движений (поддерживающие, фиксирующие), для дозированной механической нагрузки при движении (тренировочные). Комбинированные аппараты выполняют все перечисленные функции. Современные тренажеры, как правило, разрабатываются на принципах механотерапии Зандера: двуплечевого рычага, маятника, блока, действия эксцентрика между рабочим рычагом и силой тяжести. На основе этого их классифицируют по принципу работы: рычаговые, маятниковые, блоковые и т.п. В эту же классификацию также можно отнести конструкции, появившиеся благодаря новым промышленным технологиям: пневматические и на эластических тягах. Тренажеры, используемые в реабилитации, соответственно физическим нагрузкам, различаются по степени активности пациента: пассивные, пассивно-активные, активно-пассивные, активные (рис. 3.4).
В современных тренажерах используются новейшие научные технологии. В свою очередь, разработка тренажеров стимулирует развитие современной науки. Современная концепция механотерапии представляет реабилитацию как последовательный систематический процесс преемственного перехода от пассивной терапии (СРМ) к активно-пассивной. Многочисленные клинические наблюдения Зальтера показали, что CPM-терапия способствует предотвращению формирования внутрисуставных адгезий и тугоподвижности суставов, быстрому восстановлению сустава после операций, стимулирует восстановление хряща и мягких тканей сустава, способствовует регенерации (неохондрогенезу) суставных хрящей. Исследования показали, что раннее применение метода пассивного и беспрерывного восстановления подвижности конечностей является оптимальным для лечения мягких тканей, сухожилий и надкостницы.

Рисунок 3.4 – Классификация аппаратов механотерапии по степени активности пациента
Метод зарекомендовал себя как эффективное средство профилактики возникновения возможных осложнений от иммобилизации при геморраргических артрозах и периартрозах. Инструментальные данные показали, что при непрерывном использовании CPM-терапии с увеличением пассивного диапазона движения улучшается амплитуда работы мышц и гидродинамика суставов. Также доведено, что при использовании устройств CPM-терапии значительно улучшается состояние пациента, уменьшается период реабилитации и уменьшается стоимость всего процесса реабилитации. Преемственным, по отношению к СРМ-терапии стал метод активно-пассивной разработки, в котором электронное программное обеспечение позволяет постепенный переход больного к адекватным физическим нагрузкам. Электронная техника стала трамплином для развития кардиотренировки. Кардиотренажеры позволили преодолеть проблему внезапной смерти во время оздоровительного бега, а, также, усовершенствовать тренировки в анаэробных видах спорта. Электронные системы контроля позволяют дозировать физическую нагрузку и варьировать ее в зависимости от малейших изменений функционального состояния пациента, даже, не воспринимаемых на уровне сознания.
3.2. Назначение и классификация мехатронных систем реабилитации
Мехатронные системы для реабилитации людей с ограничениями жизнедеятельности (МСР), реабилитационные технологии или вспомогательные технологии — общее название средств для облегчения повседневной жизни людей с инвалидностью и другими ограничениями жизнедеятельности.
К техническим средствам реабилитации инвалидов относятся устройства, содержащие технические решения, в том числе специальные, используемые для компенсации или устранения стойких ограничений жизнедеятельности инвалида.
Мехатронными системами реабилитации инвалидов являются:
· медицинские роботы для реабилитации (рассмотрено в гл. 2).
· специальные средства для самообслуживания;
· специальные средства для ухода;
· специальные средства для ориентирования (включая собак-проводников с комплектом снаряжения), общения и обмена информацией;
· специальные средства для обучения, образования (включая литературу для слепых) и занятий трудовой деятельностью;
· протезные изделия (включая протезно-ортопедические изделия, ортопедическую обувь и специальную одежду, глазные протезы и слуховые аппараты);
· специальное тренажерное и спортивное оборудование, спортивный инвентарь.
Номенклатура технических средств реабилитации определена ГОСТ Р 51079-2006 и насчитывает многие сотни наименований изделий, предназначенных для уменьшения ограничений жизнедеятельности инвалидов, расширения возможностей по самообслуживанию и уходу за инвалидами.
Примеры МСР:
· Системы для реабилитации конечностей или суставов человека (плечевой сустав, локтевой сустав, коленный сустав и т.д.)
· Слуховой аппарат
· Протезирование
· Специальные средства при нарушении функций выделения
· Калоприемник
· Мочеприёмник
· Речь, зрение
· Синтез речи
· Двигательная функция
· Инвалидное кресло / инвалидная коляска
· Пандус
· Распознавание речи
· Слух
· Кохлеарный имплантат
· Слуховой аппарат
· Телевизоры и видеомагнитофоны с поддержкой скрытых субтитров.
· Зрение
· vOIC — системы звуковой замены зрения
· биоэлектронные зрительные имплантаты
· Программное обеспечение
· Нарушение слуха
· Визуальные оповещатели
· Конверторы текста в сурдопоток
· Нарушение зрения
· Синтезаторы речи — различные озвучивающие текст или просто имеющие голосовой интерфейс программы. Используют как платные, так и бесплатные голосовые движки.
· Нарушение опорно-двигательного аппарата
3.3. Современные устройства механотерапии
Многие пациенты, перенесшие инсульт, травматическое повреждение головного мозга, другие неврологические заболевания или костно-мышечные повреждения обладают остаточной нейромышечной функцией верхней конечности. Но выраженная мышечная слабость и собственный вес конечности не дают возможность пациентам в полной мере восстановить утраченную функцию. Аппарат Armeo (рисунок 3.5) компенсирует вес верхней конечности, позволяя пациенту даже с небольшими остаточными функциональными возможностями выполнять тренировочные задачи в режиме 3-D симуляции реальных жизненных ситуаций.

Возможность в реальном времени наблюдать успешное выполнение заданий поврежденной конечностью стимулирует пациента тренироваться усерднее и следовать указаниям врача. Система компенсации веса Armeo позволяет укреплять поврежденную верхнюю конечность посредством упражнений, симулирующих повседневную активность, улучшая функции и предотвращая неблагоприятные эффекты от вынужденной длительной обездвиженности конечности. Программное обеспечение Armeo и видео-упражнения мотивируют пациентов и помогают оценивать прогресс терапии. Предусмотрен широкий выбор эффективных и увлекательных упражнений в форме видеоигр с различными уровнями сложности для соответствия способностям каждого пациента. Чувствительный к давлению джойстик улавливает даже небольшое по силе сжатие кисти, облегчая выполнение упражнений для развития хватательной функции верхней конечности на ранней стадии терапии. Специальные упражнения, объединяющие пронацию и супинацию, помогают пациентам значительно расширить доступный объем движений. Программное обеспечение Armeo точно регистрирует движения верхней конечности, позволяя врачу оценить координаторные способности пациента и прогресс терапии. Armeo может использоваться как компьютерная мышь или джойстик в среде MS Windows, давая возможность пациенту работать в сети Интернет или управлять стандартным программным обеспечением. Armeo предлагает занимательную, мотивированную терапию с немедленной пациент-специфичной обратной связью и позволяет точно оценивать прогресс терапии.
Технология JAS предназначена для восстановления функции тугоподвижных суставов. С успехом используется методика статического прогрессивного вытяжения (SPS). В основе методики лежит механическое растяжение тугоподвижного сустава и его последующая релаксация, чередуемые каждые 5-8 минут в течение 30-40 минут. В отличие от динамического вытяжения с помощью других методик, методика SPS позволяет получить более быстрые результаты. Максимально возможный объём восстановления функции тугоподвижных суставов при использовании методики SPS достигается за 7-10 недель. При этом методика SPS применяется для короткой терапии (по 30 минут 3 раза в день) и является менее утомительной для пациентов.
Методика проста в использовании: пациент имеет возможность самостоятельно регулировать нагрузку, ориентируясь на свои ощущения. Предлагаемые приборы используются на суставах с ограниченным уровнем подвижности в тех случаях, когда невозможно постоянное пассивное движение - в том числе при высоко болезненных движениях в суставах.
|
|
|
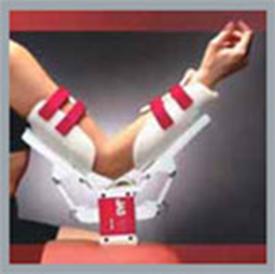
Рисунок 3.6. Аппарат JAS для локтевого сустава
Комплектация:
• ложе для плеча (фиксируется по центру бицепса мягкими ремнями)
• ложе для предплечья (фиксируется мягкими ремнями)
Ложа соединены шарниром с блоком регулировки угла.
Объем движений:
• сгибание 1380,
• разгибание 100.
Объем движения увеличивается постепенно, с каждым новым занятием.
4 размера ремней.
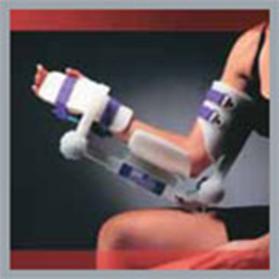
Рисунок 3.7 Аппарат JAS для локтевого сустава пронация/супинация предплечья
Комплектация:
• ложе для предплечья (крепится ремнями по центру бицепса, 4 размера ремней)
• ложе для кисти
Объем движений:
• супинация 120,
• пронация 100.
Объем движения увеличивается постепенно, с каждым новым занятием.

Рисунок 3.8 Устройство Kinetec 6080 elbow CPM
Автоматически корректирующееся пассивное движение локтевого сустава с одновременным вращением предплечья или без него. Этот тренажер удобен и легок в использовании в кровати или кресле. Использование этого тренажера предотвращает такие нежелательные постоперационные осложнения, как тугоподвижность сустава и потеря гибкости сустава.
Ортопедическая насадка на локоть Е2 (А2Е) предназначена непосредственно для восстановления подвижности верхней конечности, а также используются для лечения и реабилитации больных с травмами и заболеваниями в предплечевой области и локтевом суставе (рис. 3.9). Может применяться при лечении последствий ДЦП, восстановлении двигательной активности после инсультов, постоперационный период, повреждении периферических нервов, сосудистых заболеваниях.

Рисунок 3.9.Устройство Е2 (А2Е) CPM (локтевой сустав)
Устройство Е2 (А2Е) является портативным (2,5кг), предназначено для восстановления подвижности в локтевом суставе и предплечевой области.Диапазон параметров движений включает синхронизацию пронации и супинации предплечья, во время сгибания и разгибания локтевого сустава.Устройство можно применять для лечения и реабилитации, как взрослых, так и детей.Для безопасности пациента в устройстве Е2(А2Е) используется функция "Reverse-on-Lode" для изменения направления нагрузки - направление движения нагрузки в устройстве изменяется в случае когда пациент будет препятствовать движениям работе приспособления Е2(А2Е) или когда движение аппарата будет по каким-либо причинам затруднено.
Одним из наиболее простых и вместе тем широко используемых устройств является тренажер для сгибания и разгибания пальцев немецкой фирмы BEKA-Hospitec (рис. 3.10) .

Рисунок 3.10.Тренажер для сгибания и разгибания фирмы ВЕКА-Hospitec (Германия)
Устройство представляет собой специальный тренажер с подставкой для предплечья (с возможностью регулирования угла наклона) и системой петель для пальцев рук, закрепленной на подставке. Упражнение может проводиться в положении пронации и супинации. Размеры устройства составляют 400х200х200 мм.
Kinetec Maestra Portable hand CPM (Франция)
Kinetec Maestra Portable hand CPM представляет собой портативный реабилитационный тренажер французской фирмы Kinetec, разработанный для CPM-терапии кистей и пальцев рук (рис. 3.11).
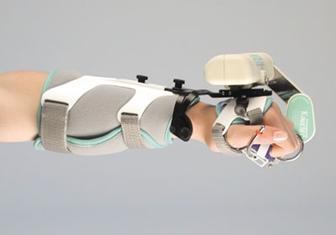
Рисунок 3.11. Тренажер Kinetec Maestra Portable hand CPM (Франция)
Этот тренажер позволяет проводить быструю и простую в применении двигательную терапию для широкого спектра показаний. По своим характеристикам не уступает тренажерам Kinetec Maestra Hand and Wrist, но имеет дополнительную особенность – портативность.
Диапазон движений: от 15° - гиперэкстензия до 270° - сгибание (сжатие в кулак). Скорость (5 уровней): от 27 до 135 секунд (цикл: 0° - 270° - 0°).
Устройство KinetecSpectrakneeCPM (рис. 3.12) предназначено для лечения и реабилитации больных с травмами и заболеваниями в области коленного сустава.

Рисунок 3.12.Устройство Kinetec Spectra knee CPM.
Диапазон движений: от -10° (гиперэкстензия) до 120° (сгибание).
Достоинством данного устройства служит возможность задания индивидуальных программ (16 индивидуальных программ), однако само устройство не обеспечит динамической адаптации к изменению состояния пациента.
Устройство KinetecSpectraDC (DataCapture) предназначено для реабилитации коленного сустава у пациентов со значительной массой тела (рис. 3.13).

Рисунок 3.13. УстройствоKinetec Spectra DC (Data Capture)
Пульт управления оснащен картой памяти, которая позволяет записывать данные по тренировочным сессиям каждого пациента. Устройство имеет уникальное программное обеспечение Kinetecи оснащено USB-интерфейсом.
Пульт управления оснащен функциями СТОП/СТАРТ/РЕВЕРС. Таким образом, возможно остановить тренажер и выбрать направление движения в любой момент времени пациентом. Для обеспечения более комфортной тренировки в дополнительный комплект входят: прокладка, 4 ремня-фиксатора для ног и держатель для стопы.
Диапазон движений в коленном суставе составляет от -5° (переразгибания) до 115° (сгибания).
Ортопедическое приспособление СРМ L4 (рис. 3.14.) предназначено для лечения и реабилитации больных с травмами и заболеваниями в области тазобедренного и коленного суставов. Может применяться при лечении последствий ДЦП, восстановлении двигательной активности после инсультов, постоперационный период, повреждении периферических нервов, сосудистых заболеваниях.

Рисунок 3.14. Ортопедическое приспособление СРМ L4.
Ортопедическое приспособление СРМ L4 выполняет широкий диапазон движений на сгибание в области коленного сустава: от -10° до 135°. Данный аппарат также регулируется по размерам каждого пациента и может применяться как для детей, так и для взрослых. Преимущество при использовании данной модели – стабильная угловая скорость, которая предотвращает адгезии и контрактуры. Ортопедическое устройство L4 также минимизируют переднее большеберцовое смещение и обеспечивают минимальную нагрузку на сустав, осуществляет синхронную разработку тазобедренного, коленного суставов, а также поддерживает регулировку движений голеностопного сустава для полного пассивного восстановления подвижности нижней конечности. Меры безопасности в себя включают контроль всех операций блоком управления, который изменяет направление движения при выключении и включении, а также изменяет нагрузку при сопротивлении пациента движениям аппарата или когда движение устройства по каким-либо причинам затруднено. Данное устройство также является устройством принудительного движения.
4. МЕХАТРОННЫЕ СИСТЕМЫ ДЛЯ МАНУАЛЬНОЙ ТЕРАПИИ И МАССАЖА
4.1. Особенности проектирования устройств для массажа
В медицине существует множество процедур, связанных с пространственными манипуляциями. Эти манипуляции проводят руки врача, причем часто с участием зрения. Манипуляции на мягких тканях приводят к направленному деформированию определенных активных участков мягких тканей, что и является целью манипуляций врача и робота. Для робота необходимые манипуляции могут быть воспроизведением движений рук человека, а впоследствии, с учетом возможностей робота, появятся новые, неизвестные сейчас манипуляционные техники.
Чаще всего в массажной практике применяются вибромассаж, пневмомассаж (вакуумный) и гидромассаж.
Особенно часто аппаратный массаж применяется при выполнении вибрационных приемов, т.к. с помощью ручного массажа невозможно произвести вибрацию достаточно длительно. С этой целью применяются вибрационные аппараты.
Этот способ аппаратного массажа основан на передаче массируемой поверхности колебательных движений различной амплитуды и частоты
посредством вибрационного аппарата. Степень воздействия аппаратной вибрации на организм зависит от частоты и амплитуды колебаний, а также от продолжительности воздействия.
Вибромассаж оказывает воздействие на нервную систему: вибрация возбуждает нервы, которые перестали выполнять свои функции; слишком возбужденные нервы вибрация способна успокоить. Стимулируют нервную деятельность слабые вибрации, сильные же, наоборот, сдерживают ее.
Вибромассаж оказывает воздействие на сосудистую систему, он улучшает кровообращение, нормализует сердечно-сосудистую деятельность. Доказано, что низкие колебательные частоты (до 50 Гц) способны вызвать понижение артериального давления, а высокочастотные колебания (до 100 Гц), наоборот, поднимают артериальное давление, а также увеличивают число сердечных сокращений.
Аппаратная вибрация улучшает работу органов дыхания, активизирует обменные процессы в организме. Благоприятные воздействия оказывает вибромассаж на нервно-мышечный аппарат. Вибромассаж способен повысить работоспособность уставших мышц, т. к. он вызывает положительные реакции нервной системы и улучшает кровоснабжение мышц, а также улучшает окислительно-восстановительные процессы в мышечной ткани.
Научно доказано, что ежедневное использование вибромассажа приводит к длительному повышению работоспособности человека. Вибромассаж оказывает тонизирующее воздействие на массируемые ткани, а также противоспалительное и обезболивающее. Для достижения максимального эффекта применять аппаратный массаж лучше всего на биологически активных точках (БАТ) и сегментарно-рефлекторных зонах.
Аппаратная вибрация применяется при лечении заболеваний опорно-двигательного аппарата, последствий переломов и травм, бронхитов и бронхиальной астмы, радикулитов, остеохондрозов, заболеваний центральной нервной системы.
Широко применяется аппаратная вибрация в спортивном массаже перед тренировками и после них.
Все аппараты, применяемые при вибромассаже, можно разделить на аппараты для локальной (частной) вибрации и аппараты для общей вибрации.
Сегодняшняя техника может заменить руки человека с высокими координационными и чувствительными способностями. Выигрыш робота в процедурах достигается за счет более точных, надежных действий, независимых от нервного напряжения врача, его субъективных оценок, а также за счет возможности многократного повторения определенных процедур. Другие преимущества робототехники – неутомимость, адаптация к индивидуальным особенностям пациента.
Сложность для автоматизации роботного воспроизведения массажных движений состоит в том, что траектория и усилия, обеспечивающие необходимые деформации мягких тканей, зависят от большого числа заранее неизвестных параметров и практически могут быть получены лишь в результате многократного повторения и коррекции приема со стороны и пациента, и врача. Критериями оценки правильности выполнения приема, а, следовательно, точности получения траектории и необходимого усилия являются с одной стороны ощущения пациента, с другой стороны критериями являются наблюдения и ощущения врача.
Проектирование устройств для массажа имеет ряд особенностей. При разработке их конструкции и системы управления необходимо решать следующие задачи: согласование систем координат пациента и робота, масштабирование, коррекция сдвигов пациента, обучение и самообучение, диагностика биомедицинских параметров пациента во время процедуры, введение биологической обратной связи. Для решения поставленных выше проблем необходим мехатронный подход к проектированию массажной системы .
На рисунке 4.1 представлена трёхуровневая структура управления мехатронной системой для мануальной терапии и массажа.
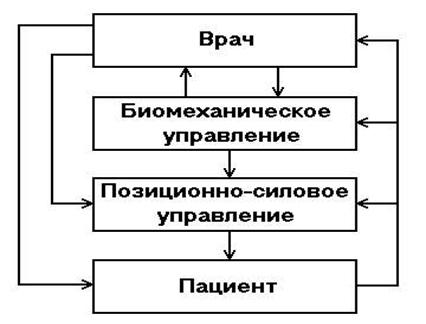
Рисунок 4.1. Структура управления массажным устройством
Задачей верхнего уровня системы является контроль медицинской процедуры со стороны врача с выработкой необходимой коррекции процедуры. Второй уровень управляет биомедицинскими параметрами, изменяя параметры траектории рабочего инструмента и развиваемых им усилий, являющихся заданными для нижнего уровня позиционно-силового управления.
В показанной на рис. 4.1 системе существует ряд неопределенностей:
1. Траектория инструмента, закрепленного на конечном звене манипулятора, и усилия взаимодействия инструмента с мягкими тканями не являются заранее определенными и программируемыми. Приблизительно определен лишь рисунок движения.
2. Расположение пациента по отношению к манипулятору точно не определено и может меняться во время процедуры.
3. Механические параметры мягких тканей (инерционность, вязкость, упругость) различны для пациентов и участков тела и могут изменяться во время процедуры.
4. Не полностью определены необходимые эффективные значения биомедицинских параметров так же, как связь их с параметрами механического воздействия.
4.2 Классификация устройств для автоматизированного массажа
На рис. 4.2 показана классификация устройств для автоматизированного массажа.
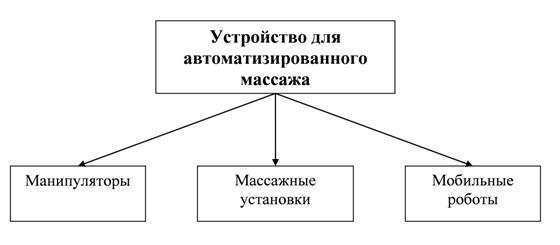
Рисунок 4.2. Классификация устройств для автоматизированного массажа
Роботы-манипуляторы по своей конструкции аналогичны промышленным манипуляторам, дополненным датчиками для силомоментного очувствления.
Массажные установки состоят из двух частей: устройства для массажа, перемещающегося по массируемой поверхности, и внешней системы управления, включающей в себя компьютер и при необходимости ряд дополнительных устройств (видеокамеры, системы наблюдения и т.д.).
Мобильные роботы в своем корпусе имеют внутренний источник питания, приводы, позволяющие устройству перемещаться, систему управления и датчики, они не связаны ни с какими внешними устройствами.
4.3. Существующие конструкции устройств для автоматизированного массажа
Впервые идея управления аппаратными средствами массажа с использованием робота была предложена на Втором симпозиуме по медицинской робототехнике в Гейдельберге в 1997 году. Шестизвенный промышленный робот Пума 560, предназначенный для сборки и дуговой сварки, был дополнен силовым датчиком для измерения усилия взаимодействия инструмента робота с мягкими тканями пациента (рис. 4.3).
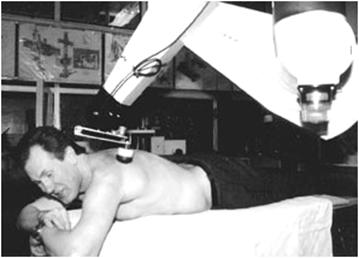
Рисунок 4.3. Робот-массажист на основе робота-манипулятора Пума 560
Робот при помощи датчика «ощущал» пациента, запоминал его рельеф, упругость, затем вычислял массажные траектории и воспроизводил их своими приводами. Штатная система управления робота, предназначенная для позиционного и контурного управления, могла реализовать только простые алгоритмы раздельного позиционно-силового управления. Робот выполнял различные техники классического и точечного массажа на макетах, собаке и людях-пациентах. Отзывы врачей о работе робота-массажиста были положительными, так как роботные движения и деформации мягких тканей от инструмента робота были в основном подобны движениям и деформациям от человеческих рук. Преимуществом робота была его неутомимость.
Рассматриваемый робот выполнял только демонстрационные функции, потому что невозможно было выполнить ряд условий безопасной работы робота в массаже и мануальной терапии с различными пациентами. Система управления робота имела закрытую программную и аппаратную архитектуру, поэтому не могла осуществлять быструю обработку большого количества данных в реальном времени, в частности быструю роботную калибровку, адаптацию робота к пациентам различных размеров, рельефов, масс.
Совершенствование роботов-массажистов на основе манипуляторов происходит постоянно. В Московском Государственном Индустриальном Университете совместно с Российским Научным Центром восстановительной медицины и курортологии разработан медицинский робот-манипулятор, предназначенный для демонстрации различных техник мануальной терапии и массажа: классический и точечный массаж, позиционная и толчковая мобилизация, постизометрическая релаксация, втирание ароматических масел (рис. 4.4).
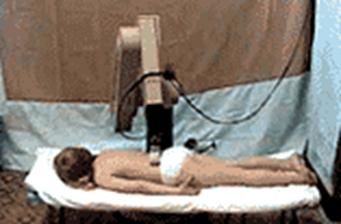
Рисунок 4.4. Российский робот-массажист
Данный робот снабжен сменным инструментом для захвата мягких тканей при массаже, захвата конечностей пациента в пассивных движениях, для имитации частей рук врача: подушечки большого пальца, плоскости ребра ладони, роликов и иголок для имитации рефлексотерапии. Как носитель робот может перемещать вдоль поверхности тела с заданным усилием различные диагностические приборы, насадки для стимуляции. Позиционно-силовая система управления робота обеспечивает взаимодействие робота и пациента с задаваемыми усилиями в диапазоне до 100 Н. Режимы обучения и самообучения адаптируют робота к любому пациенту. Безопасность робота обеспечивается специальной системой, которая использует измерение усилия и податливость робота.
Робот-манипулятор, выполняющий массаж лица для лечения различных расстройств, связанных с лицом, челюстью и полостью рта, разработан в Японии в университетах Васеда и Асахи (рис. 4.5).
Робот WAO-1 состоит из двух полуметровых манипуляторов с алюминиевыми массажными устройствами на концах. Компьютер контролирует положение манипуляторов в пространстве, задавая точки массажа, угол наклона массажных наконечников, силу и частоту нажатия. Массажная система оснащена ограничителем, не позволяющим роботу надавить на лицо слишком сильно.


Рисунок 4.5. Робот-массажист лица WAO-1
Голландскими учеными разработан мобильный робот-массажист Tickle (рисунки 4.6, 4.7). В металлическом корпусе расположены два электродвигателя с напряжением питания 5В, аккумуляторная батарея и четыре датчика, позволяющих следить за наклоном поверхности, по которой передвигается робот-массажист. Движение осуществляется с помощью двух силиконовых гусениц, покрытых выступами, создающими массажный эффект.
Принцип движения робота напоминает принцип движения танка: каждый из двигателей приводит в движение свою гусеницу. При движении вперед работают оба мотора, а при повороте один из них отключается. Робот весит 165 г и способен передвигаться по телу человека со скоростью 1,2 см/с. Робот не падает со спины за счет использования четырех датчиков положения - если угол наклона поверхности превышает критический, робот меняет направление движения.
|
|
|

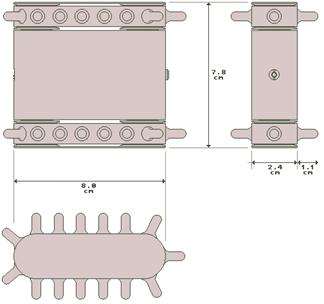
Для использования другого массажного устройства, разработанного голландскими учеными, необходима массажная установка Tickle Salon (рис. 4.8). Она состоит из массажера, жидкокристаллического монитора и кровати, на которую ложится человек. Массажная установка состоит из двух частей: стационарной (рис. 4.9), крепящейся на потолке над кроватью, и подвижного элемента (рис. 4.10), который совмещает функции датчика и массажера.
|
|
| |
|
|
| |
|
Рисунок 4.10 Подвижный элемент – массажер - установки Tickle Salon |
Рисунок 4.11 Контролирование положения подвижного элемента – массажера - установки Tickle Salon в трехмерном пространстве | |
|
|
|
|

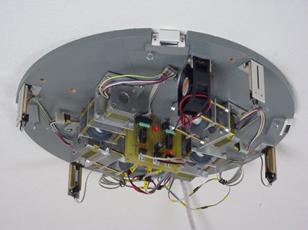

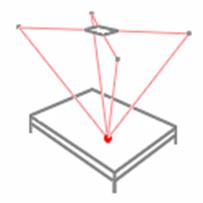
Массажер закреплен на четырех нитях к стационарной части установки. Он может свободно перемещаться за счет изменения длины нитей, осуществляемой с помощью шаговых двигателей, управляемых контроллером компьютера. Подвижный элемент – массажер - может находиться в любой точке в трехмерном пространстве между потолком и кроватью и в каждый момент времени его положение четко контролируется (рис. 4.11).
При соприкосновении массажера с поверхностью кожи происходит небольшой удар, который приводит к уменьшению напряженности в одной или более нитях, что фиксируется датчиками. Координаты точек соприкосновения массажера с поверхностью кожи заносятся в память компьютера, и создается трехмерная карта тела человека. С помощью карты система управления может определять наиболее чувствительные точки, которые затем массажер и будет массировать. Изображение карты тела выводится на монитор, к которому подключена электроника массажной установки.
Предварительная карта тела человека совершенствуется и обновляется по мере перемещения массажера по телу человека. При этом осуществляется массаж кожи, мягкое поглаживание.
Массажер для ног AV2500FHS производства Корея, изображенный на рисунке 4.12. снимает усталость и возвращает легкость походки.
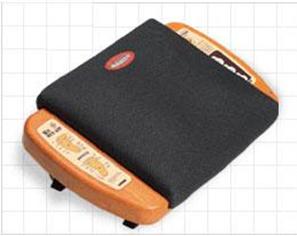
Рисунок 4.12. Массажер для ног AV2500FHS
Дизайн и размеры массажера позволяют использовать его не только для общего массажа обеих ног, но также он идеально подходит для массажа других частей тела. Массажер расслабляет, снимает усталость и напряжение в мышцах; стимулирует кровообращение и работу внутренних органов; компенсирует недостаток движения; помогает при невралгии и мышечной боли.
Характеристики:
- компьютерное управление массажем;
- 30*4 типа ритмов массажа , в соответствии с встроенной программой.;
- действие независимо от веса пользователей 10 минут работы для безопасного использования.
Массажер для ног FM 35 (рисунок 4.13) оснащен 2 ступенями вибромассажа, инфракрасным нагревом и зоной для массажа рефлекторных зон.

Рисунок 4.13. Массажер для ног FM 35
Имеющая эргономичную форму массажная поверхность благодаря мощному вибромассажу расслабляет мускулатуру ног. Функция инфракрасного нагрева ослабляет напряженность ног и интенсифицирует кровообращение. Благодаря удобной ручке массажер FM 35 можно легко переносить и использовать там, где удобно.
Особенности модели Beurer FM35:
- 2 режима;
- мощность примерно 50 Ватт;
- рефлекторный массаж ног.
Наряду с зарубежными аналогами встречаются и отечественные разработки в данной отрасли. На рис. 4.14 представлен магнитный вибромассажер для ног (МК-828).

Рисунок 4.14. Магнитный вибромассажер для ног (МК-828)
Это широко известная модель для улучшения кровообращения стоп ног и стимуляции точек акупунктуры. Массажер стимулирует точки акупунктуры стопы, благотворно влияя на внутренние органы, сочетание магнитного и массажного воздействия улучшает кровообращения, снимает усталость и мышечное напряжения ног, способствует улучшению самочувствия. На рабочей поверхности массажера расположены 832 микрошипа и шаровой прессинговый массажер для разработки стопы. Данный медицинский аппарат имеет 2 уровня интенсивности вибрации.
5.1. Назначение и классификация экзоскелетов
Экзоскелеты - устройства, предназначенные для увеличения мускульной силы человека за счёт приводов, расположенных на внешнем каркасе. Сам термин «экзоскелет» означает «опорный каркас, находящийся вне тела». Экзоскелет повторяет биомеханику человека для пропорционального увеличения усилий при движениях.
Одной из главных областей применения экзоскелетов являются помощь инвалидам, реабилитация после полученных травм или нарушения работы опорно-двигательного аппарата, помощь аварийным службам при разборах завалов рухнувших зданий, помощь при переноске тяжестей. Особая конструкция экзоскелета позволяет осуществлять защиту от внешних механических воздействий.
5.2. Существующие конструкции экзоскелетов
Экзоскелет повторяет биомеханику человека для пропорционального увеличения усилий при движениях. Реально действующие образцы в настоящее время созданы в Японии и США.
Рассмотрим некоторые представленные конструкции.
Первый экзоскелет (рисунок 5.1) стали разрабатывать еще в 60-х годах прошлого века. Проектирование производил флагман американской промышленности General Electric. В результате на свет появилась массивная гидравлическая конструкция под названием Hardiman. Получившееся устройство представляло собой громоздкую конструкцию весом 680 кг с электро-гидравлической трансмиссией, которая позволяла поднимать груз весом до 110 кг при усилии оператора на руку 4,5 кг. При этом он обладал низкой скоростью и жалкой грузоподъемностью. На тот момент не разработок нужных технологий для синхронизации движений экзоскелета с движениями оператора. Hardiman периодически совершал спорадические перекосы, способные повредить человека, находящнгося внутри него. Из-за технических трудностей проект был закрыт.


Рисунок 5.1. Человек в экзоскелете Hardiman
Экзоскелет «HAL 900» (рисунок 5.2) представляет собой подобие «симулятора» конечностей, который берет на себя нагрузки, испытываемые обычно человеком при ходьбе и выполнении работ. Вес комплекта достигает 40 килограмм, но это не существенно, поскольку экзоскелет способен нести свой вес и вес человека. Экзоскелет способен вернуть полноценную жизнь даже частично парализованным людям — никакой физической работы владельцам HAL-9000 выполнять не нужно, все управление осуществляется посредством специальных пультов.
Разработка предназначается представителям трех целевых групп: людям, которые восстанавливаются после полученных травм, пожилым людям, которым сложно выполнять любую физическую работу, людям, кто выполняет физическую работу, и желает облегчить её.

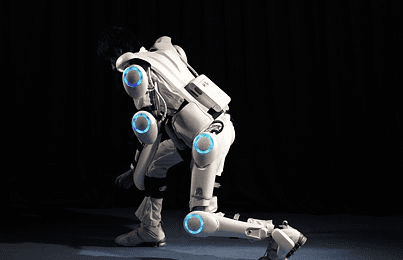
Рисунок 5.2 Человек в экзоскелете «HAL 9000»
Работа над проектом роботизированного экзоскелета «XOS 1» (рисунок 5.3) идёт с 2000 года. Сейчас руководит этим делом американская компания Raytheon, занимающаяся в основном разработкой и созданием продуктов для оборонной сферы.
У экзоскелета имеются сенсоры, регистрирующие мышечные сокращения, и есть актуаторы. Первые сигнализируют, действие каких мышц нужно сымитировать. А электродвигатели реагируют на поступающие сигналы. Происходит "улучшенная" имитация: двигатели совершают большую работу, чем мышцы. В итоге получается существенное усиление производительности человека, одетого в экзоскелет. Экзоскелет компании Raytheon увеличивает силу сидящего внутри него человека в 20 раз.
У текущей версии экзоскелета есть две проблемы. Первая — отсутствие автономного источника питания: для снабжения конструкции требуется подсоединять к ней кабель, ограничивающий свободу передвижения. Вторая — недостаточная ёмкость батареи: заряда хватает всего на полчаса работы. Из-за реакции на движения не мгновенно, а с некоторой незначительной задержкой, возникает некоторое дополнительное мышечное напряжение у оператора.

Рисунок 5.3 Экзоскелет «XOS 1»
Осенью 2010 года была представлена обновленная версия экзоскелета «XOS 2» (рисунок 5.4). Вес модели был снижен на 10 кг, а энергопотребление на 50%, единственным минусом является наличие кабеля питания.
На 2011 год компанией был запланирован переход модели на автономный источник энергии, и команда разработчиков «XOS» справилась с задачей. Инженеры усовершенствовали работающие под высоким давлением гидравлические приводы так, чтобы давление требовалось им только в момент начала действия — например, чтобы поднять за оператором конечность. Это позволило использовать для питания лёгкий двигатель внутреннего сгорания, запаса топлива для которого хватает на восемь часов работы.
Инженеры смогли вплотную приблизиться к воплощению революционного протеза для больных людей. По заявлениям разработчиков, уже сейчас человек использующий экзоскелет работает в четыре раза эффективней чем без него. Главным минусом является невозможность работы от портативных источников энергии, так как они сильно утяжеляют конструкцию.
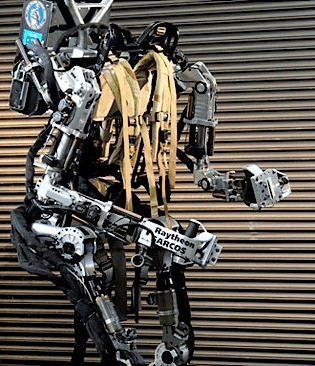
Рисунок 5.4 Экзоскелет «XOS 2»
Компания Rex Bionics создала экзоскелет «REX» (рисунок 5.5) для того чтобы он дополнил или заменил привычные инвалидные коляски: машина помогает ходить человеку, не способному самостоятельно двигаться.

Рисунок 5.5. Человек в экзоскелете «REX»
Все предыдущие разработки такого рода были ориентированы только на синхронное усиление собственных движений здорового пользователя. Устройство весит 38 килограмм и может поднимать человека весом до 100 кг. Оно помогает человеку ходить в разные стороны, поворачиваться, смещаться вбок. Аппарат может двигаться по ровным твёрдым поверхностям, в том числе и с небольшим уклоном, а также способен подниматься и спускаться по лестницам с высотой ступенек до 18 см.
Батареи питания хватает на два часа работы, причём предусмотрена горячая замена аккумулятора на предварительно заряженный. Перед использованием экзоскелета его «усаживают» в кресло или на диван. Инвалид подъезжает к устройству на своей коляске и пересаживается. Далее остаётся закрепить экзоскелет на поясе и ногах при помощи ремней с липучками и пряжками – и включить устройство. Робот по команде владельца сам поднимет его на ноги и начнёт двигаться в указанном направлении.
6. МЕХАТРОННЫЕ МЕДИЦИНСКИЕ СИСТЕМЫ, РАЗРАБОТАННЫЕ В ЮЗГУ
Учёные кафедры теоретической механики и мехатроники Юго-Западного государственного университета (г. Курск) на протяжении многих лет ведут активные исследования в области мехатронных и робототехнических систем и их различных приложений, в том числе, для медицины.
В лаборатории мехатроники и робототехники научно-образовательного центра «Мехатроника и микросистемная техника» им. проф. А.М. Алабужева, созданного при ЮЗГУ за последние несколько лет разработан целый комплекс медицинских мехатронных и робототехнических систем. В основном, эти разработки относятся к реабилитационным системам различного назначения (поврежденные конечности, суставы человеческого организма), а также устройствам для профилактики и мануальной терапии (массажеры и т.п.).
Рассмотрим более подробно некоторые разработки кафедры теоретической механики и мехатроники ЮЗГУ в области медицинских мехатронных систем.
6.1. Мехатронные реабилитационные системы
6.1.1. Автоматизированный комплекс для реабилитации кисти человека
Целью данной разработки является повышение эффективности работы устройств для реабилитации кисти человека за счет разработки оригинальной конструкции и применения цифровой системы автоматического управления с адаптивным регулятором.
Спроектированное устройство предназначено для использования в медицинских учреждениях и, следовательно, должно обладать следующими свойствами: простотой в использовании, эргономичностью, малым весом и габаритными размерами, а также возможностью питания от бытовой сети 220 В.
На основе подобранных компонентов была разработана конструкция реабилитационного устройства для кисти, внешний вид которого представлен на рисунке 6.1.
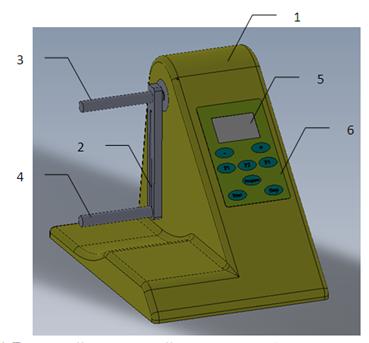
Рисунок 6.1.Внешний вид устройства для реабилитации кисти человека
На рисунке 6.1. показаны следующие компоненты:
1 – корпус; 2 – штанга для закрепления кисти (с изменяемой длинной), 3 – платформа для закрепления запястья; 4 – платформа для закрепления пальцев руки; 5 – жидкокристаллический индикатор, 6 – кнопочная панель управления.
Внутри корпуса располагаются привод вращательного движения, блок управления и блок стабилизации напряжения. На выходном валу привода посредством болтового соединения закреплена регулируемая штанга. Длина штанги регулируется посредством регулировочного болта и может быть адаптирована под разные размеры рук.
Изменение расстояния между местом закрепления руки и осью вращения кисти в процессе отработки движения осуществляется благодаря наличию в штанге пружины.
Манжеты для крепления пальцев на вращающейся платформе выполнены из эластичного материала. Фиксация манжет на конечных фалангах пальцев осуществляется при помощи «липучек». На внутренней поверхности манжет, сверху и снизу установлены эластичные датчики силы диаметром 0, 97 мм. Датчики крепятся посредством клеевого соединения и предназначены для измерения мышечного усилия при сгибании и разгибании кисти.
Привод вращательного движения состоит из шагового двигателя, планетарного редуктора, датчика момента на валу привода и датчика угла (энкодера). Общий вид привода показан на рисунке 6.2.
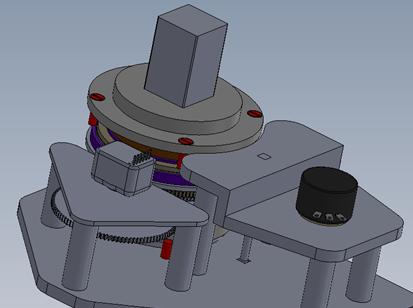
Рисунок 6.2 – Общий вид привода вращательного движения
Кинематическая схема привода устройства показана на рис. 6.3.
На рисунке 6.3 показаны следующие компоненты: M1 – шаговый двигатель, 1-13 – зубчатые колеса, 14 – потенциометр, 15 – энкодер, 16 – торсион, 17 – исполнительный элемент (штанга).

Рисунок 6.3 – Кинематическая схема привода вращательного движения
Редуктор привода вращательного движения состоит из трех ступеней планетарной передачи. Первые две ступени имеют общее корончатое колесо. Корончатое колесо третьей ступени имеет зубчатый венец с внешним зацеплением для передачи крутящего момента на торсионный вал (Рисунок 6.4)
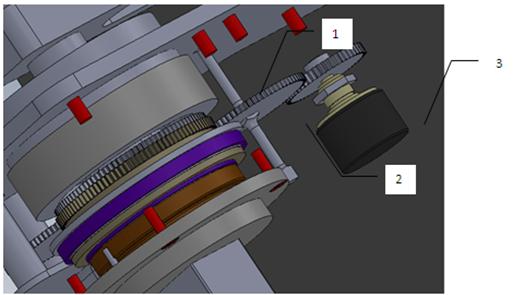
Рисунок 6.4 – Система измерения момента на валу привода (1 – торсионный вал, 2 – корончатое колесо, 3 - потенциометр)
Торсионный вал представляет собой предварительно тарированный вал, встраиваемый в привод. Служит для непосредственного измерения мощности необходимой для приведения руки больного человека в движение. Изменение угла закрутки торсиона считывается бесконтактным датчиком при помощи цилиндрической зубчатой передачи внешнего зацепления. Датчик информирует о том, какое усилие необходимо для преодоления сопротивления со стороны руки.
6.1.2. Устройство для реабилитации локтевого сустава
Целью данной разработки является повышение эффективности работы устройств для реабилитации локтевых суставов человека за счет разработки оригинальной конструкции и применения цифровой системы автоматического управления с адаптивным регулятором.
Конструкция устройства.
Общий вид конструкции механической части устройства представлен на рисунке 6.5.













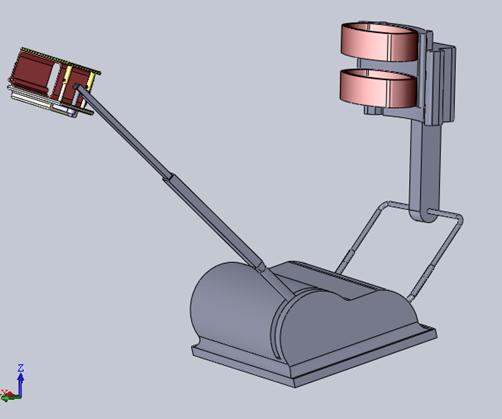
Рисунок 6.5. Внешний вид устройства для реабилитации локтевого сустава человека
К основанию 1 (рис. 6.5) с помощью фиксируемых шарнирных соединений крепится ложе для плеча 3 с промежуточным звеном 2, предназначенным для регулировки положения для каждого пациента индивидуально. Рука фиксируется при помощи манжеты 4 в области плеча и манжеты 6, соединенной с основанием при помощи телескопической трубки 5, в области запястья. С помощью приводов, расположенных в основании, осуществляется поворот телескопической трубки с манжетой и вращение вокруг оси трубки.
Для определения необходимой мощности приводов примем максимальную силу сопротивления, создаваемую мышцами, равной 60 Н. Тогда с учетом средней длины предплечья максимальный момент сопротивления равен 20 Н·м. С учетом максимальной скорости движения 1,5 рад/с и коэффициента запаса получаем требуемую мощность двигателя 35 Вт. Выбираем мотор-редуктор серии PT4835, состоящий из реверсивного коллекторного двигателя постоянного тока и планетарного редуктора. Двигатель укомплектован оптическим энкодером. Характеристики электродвигателя:
· Мощность - 35Вт
· Напряжение питания - 12В
· Скорость холостого хода - 3600 Об/мин
· Номинальная скорость - 3100 Об/мин
· Номинальный ток - 2,9А
· Крутящий момент двигателя (без редуктора) - 0,9 кг*см
· Режим работы – продолжительный
· Передаточное отношение планетарного редуктора - 313.
Для осуществления ротации выбираем двигатель втрое меньшей мощности:
Мотор-редуктор серии IG-32PGM состоит из реверсивного коллекторного двигателя постоянного тока и планетарного редуктора. Характеристики электродвигателя:
· Мощность - 13Вт
· Напряжение питания - 12В
· Скорость холостого хода - 6000 Об/мин
· Номинальная скорость - 5090 Об/мин
· Номинальный ток – 1,63 А
· Крутящий момент двигателя (без редуктора) - 0,017 кг*см
· Режим работы – продолжительный
· Передаточное отношение планетарного редуктора - 721.
В процессе движения телескопическая трубка изменяет свою длину . Кроме того, осуществляется вращение ее вокруг собственной оси. Для передачи вращающего момента профиль трубки выбран прямоугольным (рисунок 6.6)
Рисунок 6.6. Телескопическая трубка
Одной из главных особенностей механической части устройства является конструкция манжеты. Она прикрепляется к телескопической трубке цилиндрическим шарниром, позволяющим поворот манжеты при изменении положения трубки и руки. Так как рука может совершать ротацию только вокруг собственной оси, жесткое соединение с вращающейся частью устройства недопустимо. В связи с этим при повороте устройство посредством специального рычага (рисунок 6.7) оказывает давление на плоскость, к которой и прикреплена манжета.
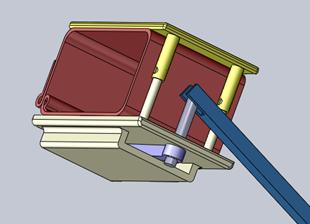
Рисунок 6.7 Конструкция манжеты (регулирование высоты)
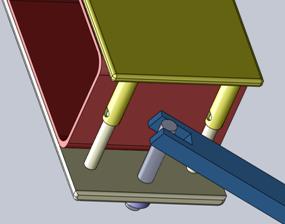
Рисунок 6.8. Конструкция манжеты (соединение манжеты с телескопической трубкой посредством цилиндрического шарнира)
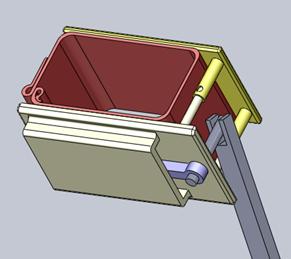
Рисунок 6.9. Конструкция манжеты (рычаг для поворота манжеты)
В лаборатории мехатроники и робототехники Юго-Западного государственного университета разработано и создано механотерапевтическое устройство для реабилитации локтевого сустава человека, трехмерная модель которого представлена на рис. 6.10.
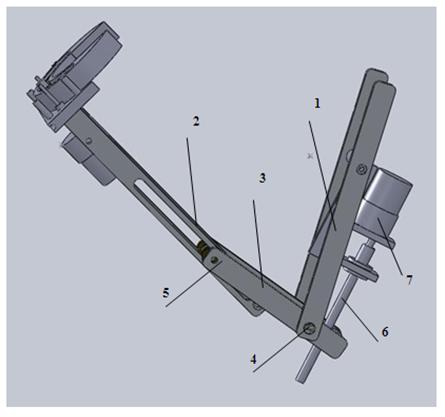
Рисунок 6.10. Трехмерная модель реабилитационного устройства.
Сгибание-разгибание
Принцип работы устройства следующий: планки плеча 1 неподвижно прикрепляются к плечу пациента при помощи манжеты (на рисунке не показана), аналогично планки предплечья 2 прикрепляются к предплечью максимально близко к локтевому суставу. Промежуточные планки 3 соединяется с планками плеча 1 при помощи оси 4, а с планками предплечья 2 посредством ползунов 5, перемещающихся в пазах планок предплечья 2. Кроме того, промежуточные планки 3 соединяются с качающейся кулисой 6 посредством передачи винт-гайка (гайка может поворачиваться относительно планок 3). Ось вращения кулисы 6 расположена на планках предплечья 1. При подаче управляющего напряжения на двигатель 7, на оси которого расположен винт 6, гайка перемещается вдоль винта, поворачивая промежуточные планки 3 вокруг неподвижной относительно руки оси. В результате этого планки предплечья 2 поворачиваются вместе с предплечьем на некоторый угол. Для компенсации смещения оси устройства относительно оси локтевого сустава, вокруг которой и будет происходить поворот планок 2, предусмотрены ползуны 5. Таким образом реализуется сгибание –разгибание руки в локтевом суставе. для осуществления пронации – супинации предплечья необходимо подать напряжение на двигатель 8 (рис. 6.11).
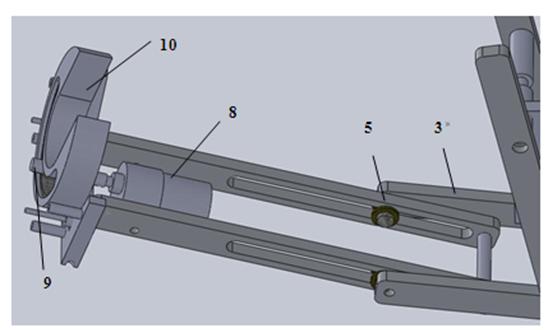
Рисунок 6.11. Трехмерная модель реабилитационного устройства. Пронация-супинация.
Вместе с валом двигателя 8 поворачивается втулка 9, которая посредством передачи трением передает вращение на звено 10, в полости которого расположена манжета, которая закрепляется на запястье пациента (на рисунке не показана). При этом ось звена 10 находится максимально близко к естественной оси вращения предплечья. Возникающая при этом несоосность компенсируется деформацией манжет. В звене 10 предусмотрены ограничители, не позволяющие звену повернуться на угол, превышающий максимально возможный угол поворота руки, что повышает безопасность эксплуатации устройства.
На рис. 6.12 – 6.16 представлен экспериментальный образец устройства для реабилитации локтевого сустава (без манжет для закрепления руки).

Рисунок 6.12. Экспериментальный стенд, общий вид

Рисунок 6.13. Экспериментальный стенд, двигатель, осуществляющий сгибание руки, и передача винт-гайка

Рисунок 6.14. Экспериментальный стенд, ползун, движущийся по пазу на планке предплечья

Рисунок 6.15. Экспериментальный стенд, крепление двигателя, осуществляющего пронацию-супинацию предплечья

Рисунок 6.16. Экспериментальный стенд, жесткая манжета предплечья
Для экспериментального стенда были выбраны приводы polulu 37Dx52L, представляющие собой мотор-редукторы с планетарным механизмом, передаточное отношение которого 19:1. Номинальное напряжение питания двигателей 12 В, при этом скорость холостого хода составляет 350рад/мин, а номинальный момент – 5кг·см. Передача вращения для сгибания руки производится посредством передачи винт-гайка и кулисного механизма, в котором гайка фактически является ползуном (рис. 6.14). Для того чтобы исключить осевую нагрузку на ось двигателя, предусмотрена качающаяся стойка, на которую винт опирается двумя шайбами, выполненными заодно с винтом (рис. 6.13). Для перемещения промежуточных планок относительно планок плеча предусмотрены ползуны, движущиеся в предназначенных для них пазах. Чтобы исключить трение между алюминиевыми планками, предусмотрены прокладки, выполненные заодно с ползунами (рис. 6.14). Для вращения манжеты, расположенной на запястье, используется передача трением: втулка, закрепленная на валу двигателя, расположена в специальном дугообразном пазе внутри манжеты (рис. 6.15). при вращении манжета скользит по двум подшипниковым опорам оси подшипников расположены в пазах опорных плоскостей. Чтобы обеспечить необходимую силу прижатия манжеты ко втулке, используются пружины, сила которых приложена к осям подшипниковых опор, предварительное натяжение регулируется с помощью винтов. Дугообразный паз выполнен таким образом, чтобы в крайних положениях втулка упиралась в ограничители (рис. 6.16). Все планки и стойка для двигателя, а так же пластины для закрепления мягких манжет выполнены из алюминия, ползуны, оси, передача винт-гайка, а также детали жесткой манжеты запястья – из полиамида-6. Все пары трения в механизме (кроме передачи трением втулка-манжета): алюминий – полиамид-6 или сталь – полиамид-6. Последний вариант используется в передаче винт-гайка, в которой предусмотрено применение консистентной смазки. Управление двигателями осуществляется от ПК при помощи управляющего модуля Freeduino.
6.1.3. Автоматизированное устройство-тренажёр для реабилитации коленного сустава человека
Устройство-тренажёр предназначено для реабилитации коленного сустава. Преимущественная цель - вернуть полный диапазон движений, улучшить силу мышц бедра, улучшить баланс сустава, достичь полного контроля при ходьбе.
Устройство состоит из нескольких частей. Это наколенный бандаж, который одевается на ногу, плотно обхватывает ногу и не сковывает движения. С двух боковых сторон на месте сгиба на нем закреплены диски с магнитной жидкостью.
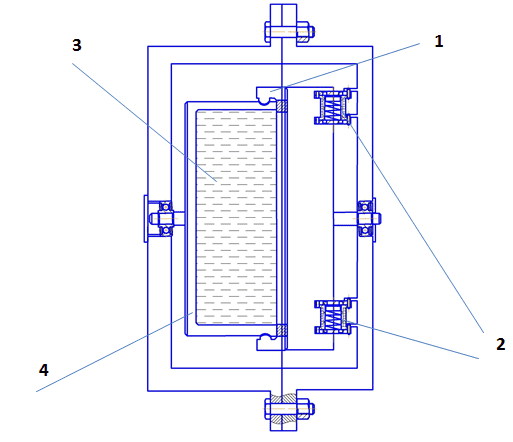
Рисунок 6.17. Чертеж диска с магнитной жидкостью
На рисунке 6.17 приняты следующие обозначения:
1 – правый диск;
2 – управляющие катушки;
3 – магнитная жидкость.
4 - левый диск.
Каждый диск состоит из двух половин – дисков, которые соединяются друг с другом плотно, но с возможностью вращения. Внутри находится магнитная жидкость. Подавая управляющее напряжение на катушки, мы изменяем параметры магнитной цепи, меняем магнитное поля в рабочем зазоре между дисками. Тем самым изменяем вязкость магнитной жидкости. Изменение вязкости магнитной жидкости приводит к изменению момента сопротивления устройства.
Тренажёр работает таким образом, что пациент должен прикладывать «противоусилие», для того чтобы преодолеть сопротивление устройства и разогнуть-согнуть ногу.
Устройство может работать в следующих режимах.
· Сгибание с нагрузкой.
Устройство с помощью датчиков контролирует усилия, создаваемые в суставе, и прикладывает необходимое «противоусилие». Программа не задает заранее усилия и нагрузки, а корректирует работу по ходу упражнений.
Питание системы производится от ПК, результаты работы передаются на ПК по протоколу RS232, там хранятся и обрабатываются.
На рисунке 6.18. представлена 3 – D модель проектируемого устройства для реабилитации коленного сустава.
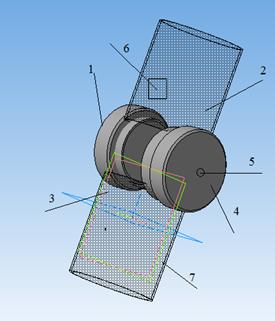

Рисунок 6.18. 3D-модель устройства для реабилитации коленного сустава.
Устройство состоит из правого диска с магнитной жидкостью (4), закрепленного на манжете (2) и левого диска с магнитной жидкостью (1), закрепленного на манжете (3). Диски закреплены таким образом, чтобы крепление не мешало относительному вращению дисков.
Энкодер расположен на выходном валу (5) дисков с магнитной жидкостью и служит для измерения угловой скорости. Тензодатчики измеряют момент и расположены на манжетах на участках (6) и (7), в местах ,где мышцы испытывают наибольшее напряжение.
Устройство питается и управляется от ПК, данные так же передаются на ПК, где в дальнейшем анализируются врачом – физиотерапевтом.
6.2. Мехатронные устройства для автоматизированного массажа
В лаборатории мехатроники и робототехники Юго-Западного государственного университета (г. Курск) разработано мобильное робототехническое устройство для автоматизированного массажа кожных покровов человека.
Массажное устройство перемещается в ограниченной области массируемой поверхности по выбираемой пользователем траектории за счет силы инерции, возникающей при периодическом движении внутренних масс. Устройство может работать в различных режимах массажа и автоматически подавать лекарственное вещество на массируемый участок. Применение данного устройства возможно как в лечебных целях, так и в целях релаксации.
Спроектированное устройство для автоматизированного массажа представляет собой сложную систему, выполняющую большое количество функций. Поэтому для обеспечения движения устройства по определенной траектории предлагается использовать массажную установку (рисунок 6.19), состоящую из стационарной (компьютер и видеокамера) и подвижной (массажное устройство) частей.
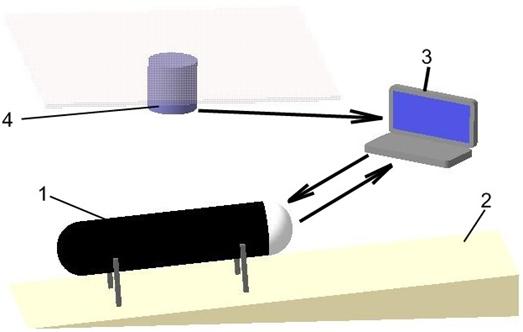
1 – массажное устройство; 2 – массируемая поверхность; 3 – компьютер; 4 – видеокамера
Рисунок 6.19- Общий вид массажной установки
На компьютере пользователем задается массируемая область, в которой устанавливается устройство, и траектория его движения. Видеокамера в режиме реального времени передает изображение положения устройства в этой области на компьютер, в котором определяется соответствие между положением массажного устройства и направлением его движения и выбранной траекторией. При необходимости происходит корректировка перемещения устройства для массажа (сигнал управления поступает с компьютера на устройство). Устройство может передавать компьютеру информацию о неисправностях, возникших при работе.
В лаборатории мехатроники и робототехники Юго-Западного государственного университета (г. Курск) разработан также автоматизированный вибромассажер стопы. В качестве привода используется электромагнит. Электромагнитный привод для вибромассажера стопы обеспечивает колебательное движение рабочего органа (резинового коврика с шипами). Управление приводом осуществляется путем подачи на электромагниты питающего напряжения.
Устройство работает в 2-х режимах:
- одновременная (параллельная) работа электромагнитов;
- поочередная (волнообразная) работа электромагнитов;
Система управления обеспечивает:
-ручное задание амплитуды вибрации рабочего органа;
-автоматическое регулирование амплитуды вибрации рабочего органа.

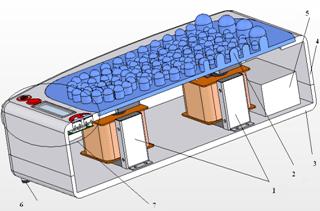
Рисунок 6.20. Общий вид вибромассажера
Устройство (рис. 6.20) состоит из двух электромагнитов 1, закрепленных на основании корпуса 3. Совершающие колебательное движение якоря электромагнитов передают вибрацию на рабочую поверхность – резиновый коврик с шипами 2, который располагается на верхней крышке корпуса 4. Питание электромагнитов и панели управления 7 осуществляется через блок питания 5. Для частичного гашения вибрации предусмотрены упругие ножки 6.
Панель управления вибромассажера представлена на рисунке 6.21.
Управление параметрами колебаний осуществляется с помощью панели управления. Устройство включается кнопкой 1. Кнопка 2 – выбор режима работы электромагнитов: одновременная (когда якоря электромагнитов колеблются синхронно) или волнообразная (якоря электромагнитов работают колеблются поочередно). Использование двух режимов работы благоприятно воздействует на качество массажа. Параметры колебаний выводятся на жидкокристалличексий индикатор 3. Изменение амплитуды колебаний осуществляется с помощью кнопки 4.
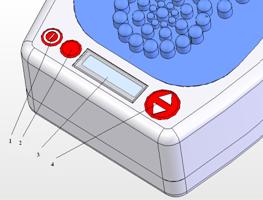
Рисунок 6.21. Панель управления вибромассажера
К отличительным особенностям проектируемого вибромассажера можно отнести наличие двух режимов вибрации, что очень благоприятно сказывается на процедуре массажа. Предлагаемый прибор предназначен для массажирования одной стопы, потому что степень заболевания одной ноги может отличаться от другой, к тому же это значительно упрощает конструкцию, уменьшает габаритные размеры. Массажер прост в использовании, не занимает много места, поэтому может легко использоваться как в медицинских учреждениях, так и в домашних условиях.
В лаборатории мехатроники и робототехники Юго-Западного государственного университета ведется разработка экзоскелета нижней конечности человека.
6.3.1 Описание схемы экзоскелета нижней конечности человека
Конструкция экзоскелета нижней конечности человека (ноги) представляет собой трёхмодульную систему, которая включает в себя подвижные шарнирнозакреплённые звенья, комбинированный привод линейного перемещения с датчиком угла поворота (энкодером), датчик нагрузки на опорную пяту и концевые предохранительные выключатели. Управления приводами происходит посредством микропроцессорного блока. Схема ноги экзоскелета представлена на рисунке 6.22:
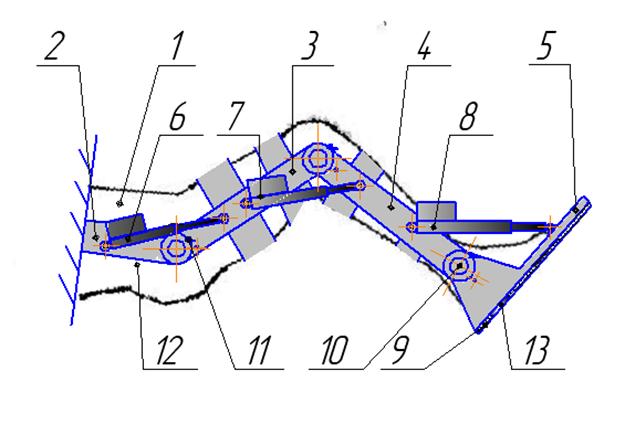
Рисунок 6.22 Схема ноги экзоскелета человека (вид сбоку):
1 – Нога человека; 2 - Стойка; 3 - Бедренное звено; 4 - Голень; 5 - Стопа; 6, 7, 8 - Приводы линейного перемещения; 9 - Резиновая подошва; 10 - Датчик угла поворота (энкодер); 11 - Предохранительный концевой датчик; 12- Ремни для закрепления на ноге человека; 13 - Датчик нагрузки на опорную пяту.
6.3.2 Алгоритм работы устройства и этапы передвижения
Передвижение ноги экзоскелета осуществляется в четыре этапа.
На I-м этапе стопа человека опирается на пяту устройства тем самым, воздействуя на датчик нагрузки, который посылает сигнал в систему управления (рисунок 6.23).
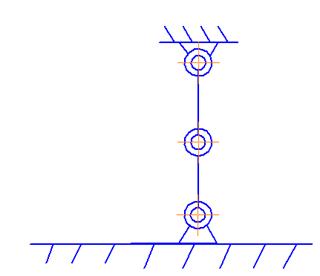
Рисунок 6.23. Начальное положение ноги
На II-м этапе, по сигналу с микропроцессора, бедренное звено и голень совершают поворот на программно заданные углы  и
и  (рисунок 6.24).
(рисунок 6.24).
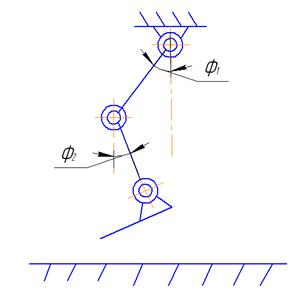
Рисунок 6.24. Второй этап движения ноги
На III-м этапе движения устройства, по сигналу микропроцессора, происходит поворот бедренного, голени и стопы на некоторые, заданные программно углы  ,
,  ,
,  .Стопа ноги ставится на опорную поверхность (рисунок 6.25).
.Стопа ноги ставится на опорную поверхность (рисунок 6.25).
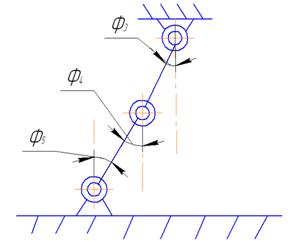
Рисунок 6.25. Третий этап движения ноги
На IV-м этапе, происходит два одновременных движения: поворот бедренного звена и голени вокруг своих осей и совместный их поворот относительно неподвижно расположенной стопы. Происходит установка устройства в начальное положение (рисунок 6.25). Углы поворота звеньев регулируются системой управления, данные о которых приходят с инкрементальных датчиков углов поворота.
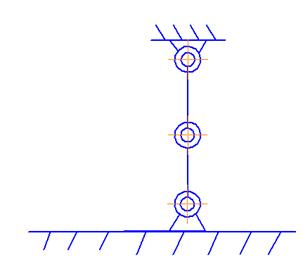
Рисунок 6.25. Четвёртый этап движения ноги
6.3.3 Описание работы экзоскелета нижней конечности человека
Устройство работает по следующему алгоритму.
На первом этапе движения нога находится в вертикальном положении, пята устройства касается опорной поверхности, в случае отсутствия касания, через некоторый промежуток времени микропроцессор посылает сигнал драйверам для включения двигателей. Происходит поворот звеньев до достижения контакта.
Второй этап движения включает в себя поворот звеньев в противоположные направления (против часовой стрелки), на углы заданные в памяти микроконтроллера, до отрыва стопы от опорной поверхности.
Третий этап – бедренное, голеностопное звено, а также стопа, поворачиваются в прямом направлении (по часовой стрелке) до достижения контакта с поверхностью. При касании в микроконтроллер поступает сигнал с датчика расположенного в стопе, бедренный, коленный и голеностопные суставы вращаются против часовой стрелки, происходит перенос центра масс тела, устройство устанавливается в первоначальное положение. В случае возникновения аварийной ситуации, например из-за сбоя работы микроконтроллера, произошло превышение допустимых углов поворота какого-либо звена, в крайних положениях звеньев расположены ограничительные выключатели, которые в момент срабатывания посылают сигнал устройству управления на приостановления работы системы. Происходит запрос на остановку устройства, в случае игнорирования сообщения об ошибке, происходит аварийное отключение устройства через 1 минуту.
Трёхмерная модель нижней конечности экзоскелета человека представлена на рисунках 6.26, 6.27.
Основные технические характеристики разработанного устройства:
Угол поворота:
- бедренного звена – от 00 до 900;
- голени – от 00 до 900;
- стопы – от -300 до 300.
Длины звеньев:
- бедренное звено – L1=0.41 м;
- голень – L2=0.41 м;
-высота стопы – L3=0.1 м.
Время поворота звеньев ноги из одного крайнего положения в другое крайнее положение:
- бедренное звено – 2с;
- голень – 2 с;
- стопа – 1с.
Диапазон рабочих температур – от 00 С до +250 С.
Относительная влажность воздуха не более 60%.
Атмосферное давление – 760 мм. рт. ст.
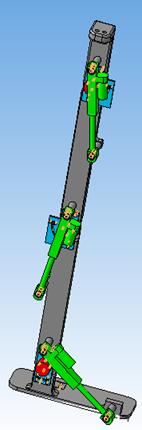
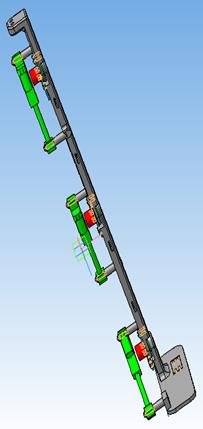
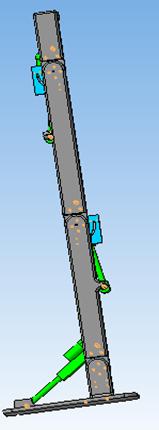
a) б) в)
Рисунок.6.26. 3D-модель нижней конечности экзоскелета человека
а) Главный вид; б) Вид слева; в) Вид справа.
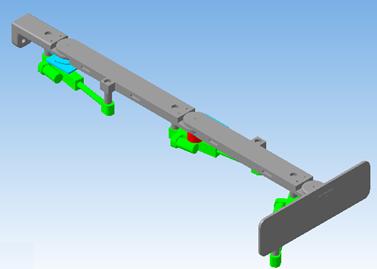
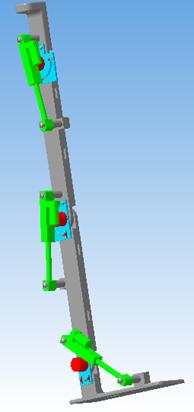
Рисунок 6.27. Общий вид 3D-модели нижней конечности экзоскелета человека
Мехатронные системы находят всё более широкое распространение в современной технике. Одним из наиболее востребованных направлений развития и внедрения мехатронных и робототехнических систем являются медицинские приложения. Очевидно, что с развитием техники, технологии, открытием новых материалов мехатронные устройства будут становиться все более миниатюрными, более быстродействующими и точными. Очевидно, что будущее медицинской техники и технологии именно за мехатронными системами.
1. Агаханян Т.М., Никитаев В.Г. Электронные устройства в медицинских приборах. Учебное пособие. 2005 год. 510 стр.
2. Белова А.Н. Нейрореабилитация .-М. Антидор, 2000 г. – 568с.
3. Боголюбов В.М., Пономаренко Г.Н. Общая физиотерапия. М.,СПб.: СЛП, 2008.
4. Головин, В.Ф. Мехатронная система для манипуляций на мягких тканях / В.Ф. Головин // Мехатроника. - 2002. - №7. – С. 218-231.
5. Головин, В.Ф. Управление медицинским роботом в условиях неопределеннойстей / В.Ф. Головин, В.В. Журавлев // С-П., труды конференции «Экстремальная робототехника». - 2006. – С. 241-258.
6. Головин, В.Ф. / Измерение параметров мягких тканей для управления медицинским роботом / В.Ф. Головин, М.Ю. Рачков // Сборник трудов 18-й конференции «Экстремальная робототехника». Спб.: ЦНИИ РТК. - 2007. – С. 94-112
7. Коган, О. Г. Медицинская реабилитация в неврологии и нейрохирургии [Текст] / О. Г. Коган, В. Л. Найдин. – М.: Медицина, 1988. – 304 с.
8. Медицинская реабилитация в неврологии и нейрохирургии. Коган О Г, Найдин В Л — М.: Медицина. 1988.
9. Руководство по реабилитации больных с двигательными нарушениями. Под редакцией А Н Беловой, О Н Щепетовой М. “Антидор” 1998
10. Саморуков, А.Е. Экспертная оценка робота для мануальной терапии и массажа. Бюллетень органа Московских мануальных терапевтов / А.Е. Саморуков, В.Ф. Головин. – М. - 2000. – С. 218-234.
11. Справочник по функциональной диагностике. Под общ. ред. И.А. Кассирского. Изд. ”Медицина”. М.2000.
12. Физическая реабилитация и профилактика наиболее часто встречающихся заболеваний суставов. Сулимцев Т И, Морозов П Ю Учебное пособие. Малаховка 1999.
13. Интернет-сайт немецкой компании BEKA-Hospiteс: http://www.beka-hospitec.de
14. Интернет-сайт компании ORMED: http://www.ortorent.ru
15. Интернет-сайт компании Kinetec: http://www.kinetec.at/
16. Интернет-сайт компании Otto Bock: http://www.ottobockus.com
17. Интернет-сайт «HI-NEWS» [Электронный ресурс]. – Режим доступа: http://hi-news.ru/robots/yaponskij-ekzoskelet-hal-vyxodit-na-mirovoj-rynok.html, свободный.
18. Интернет-сайт «HITECH-NEWSRU» [Электронный ресурс]. – Режим доступа: http://hitech.newsru.ru/article/27feb2013/darpaexskltn http://www.treffer.com.br/produtos/maxon/redutores/pdf/248.pdf, свободный.
19. Интернет-сайт «T-human» [Электронный ресурс]. – Режим доступа: http://t-human.com/journal/ekzoskelety-hal-uzhe-v-prodazhe/, свободный.
20. Selig, J. M. Introductory Robotics [Text] / J. M. Selig. – Prentice Hall, 1991. – 157 p.